
Бортовой трёхосевой интегрированный инерциальный навигационный модуль завод
По сути, заводской триаксialный инерциальный навигационный модуль – это не просто набор датчиков, это 'мозг' системы навигации в условиях, где GPS либо недоступен, либо ненадежен. Часто встречаются заблуждения: думают, что это как 'просто гироскоп и акселерометр'. Да, это базовый набор, но дальше все сложнее. Сложность не в отдельных компонентах, а в их интеграции, калибровке, фильтрации шумов, и, конечно, в программном обеспечении. В нашей практике, мы часто сталкиваемся с ситуациями, когда клиенты ожидают просто 'черный ящик', который выдаст координаты, а мы вынуждены заниматься тонкой настройкой и адаптировать его к конкретным условиям эксплуатации. Именно это отличает действительно качественное решение от 'дешевого китайского'.
Ключевые компоненты и их взаимодействие
Итак, что же входит в состав заводской триаксialный инерциальный навигационный модуль? В первую очередь – акселерометры и гироскопы. Акселерометры измеряют линейное ускорение, гироскопы – угловую скорость. Эти данные подаются в фильтр Калмана, который позволяет оценить положение и ориентацию объекта в пространстве. Но это лишь верхушка айсберга. Необходимо учитывать влияние температуры, вибрации, магнитных помех, и, конечно, точность самих датчиков. В наших проектах мы нередко сталкиваемся с проблемой нелинейности датчиков, что требует применения сложных алгоритмов для компенсации. Недавно работали над системой для дрона, работающего в условиях сильного магнитного шума – пришлось использовать специальные магнитные фильтры и тщательно откалибровать модуль.
Важнейшим элементом является, конечно, программное обеспечение. Здесь речь идет не только о фильтрах и алгоритмах, но и о модулях связи, управлении, диагностики. Желательно, чтобы программное обеспечение было гибким и позволяло адаптировать модуль к различным типам транспортных средств и условиям эксплуатации. Использование открытых стандартов и API упрощает интеграцию с другими системами. Например, в одном проекте мы разрабатывали систему навигации для морского судна, и нам пришлось интегрировать модуль с бортовой системой управления судном, используя протокол CAN.
Проблемы с калибровкой и компенсацией ошибок
Калибровка заводской триаксialный инерциальный навигационный модуль – это не просто процедура 'на глаз'. Это комплексный процесс, который требует использования специализированного оборудования и программного обеспечения. Необходимо учитывать смещения датчиков, нелинейность их характеристик, влияние температуры и вибрации. В нашей компании мы используем собственные методики калибровки, основанные на анализе данных, полученных при проведении тестовых испытаний. Это позволяет нам добиться высокой точности и надежности работы модуля. Особую сложность представляет калибровка в полевых условиях, где невозможно обеспечить стабильную температуру и отсутствие вибрации. В таких случаях приходится использовать специальные алгоритмы, которые позволяют компенсировать влияние внешних факторов.
А еще проблема возмущений. Сильные ускорения и резкие повороты могут приводить к временным сбоям в работе модуля. Для решения этой проблемы мы применяем алгоритмы, которые позволяют обнаруживать и компенсировать такие возмущения. Иногда приходится использовать несколько модулей, расположенных в разных частях транспортного средства, для повышения надежности системы.
Практический опыт: интеграция в различные платформы
Мы успешно интегрировали заводской триаксialный инерциальный навигационный модуль в различные платформы, включая беспилотные летательные аппараты, морские суда, автомобили и стационарные системы. Особый интерес представляет наша работа над системой навигации для автономных подводных аппаратов (AUV). В таких системах необходимо учитывать влияние давления, температуры и солености воды на работу датчиков. Кроме того, необходимо обеспечить высокую точность навигации в условиях отсутствия видимости и сильных течений. В этом проекте мы использовали специальные датчики, устойчивые к высоким давлениям, и разработали алгоритмы, которые позволяют компенсировать влияние течений. Результаты испытаний показали высокую точность навигации даже в сложных условиях.
В сфере автомобильной промышленности мы разрабатываем системы повышения устойчивости и безопасности, основанные на данных, полученных с заводской триаксialный инерциальный навигационный модуль. Эти системы позволяют предотвращать заносы и скольжения, а также автоматически корректировать траекторию движения. Одним из ключевых требований в этой области является низкая задержка и высокая надежность работы модуля. Мы используем модули, которые соответствуют требованиям автомобильной промышленности и прошли необходимые испытания. В некоторых случаях мы модифицируем существующие модули, чтобы адаптировать их к конкретным требованиям заказчика.
Наши ошибки и уроки
Не все проекты заканчиваются успешно. В одной из наших первых попыток интеграции модуля в систему управления беспилотным самолетом, мы недооценили влияние электромагнитных помех. В результате, модуль выдавал неверные данные, и система управления самолетом работала нестабильно. Пришлось переработать схему электропитания и использовать экранированные кабели. Этот опыт научил нас уделять больше внимания вопросам электромагнитной совместимости. Также, важно проводить тщательное тестирование системы в различных условиях эксплуатации, чтобы выявить и устранить потенциальные проблемы.
Еще одна ошибка – недостаточная калибровка модуля в условиях реальной эксплуатации. Мы полагались только на лабораторную калибровку, но не учитывали влияние внешних факторов. В результате, точность навигации в полевых условиях была значительно ниже, чем ожидалось. В дальнейшем мы внедрили систему непрерывной калибровки, которая позволяет автоматически корректировать параметры модуля в процессе эксплуатации. Это позволило нам значительно повысить точность и надежность системы.
ООО Сиань Чэнань Измерение и Контроль Технологии: подход к решению задач
Компания ООО Сиань Чэнань Измерение и Контроль Технологии, основанная в 2011 году, обладает значительным опытом в разработке и поставке электронного оборудования для различных отраслей промышленности. Мы фокусируемся на заводской триаксialный инерциальный навигационный модуль, предлагая как готовые решения, так и индивидуальные разработки под заказ. Наша команда состоит из опытных инженеров, которые обладают глубокими знаниями в области навигации и обработки сигналов. Мы тесно сотрудничаем с нашими клиентами, чтобы понять их потребности и разработать оптимальное решение. По сути, мы предлагаем комплексный подход, начиная от проектирования и разработки, заканчивая поставкой и сервисным обслуживанием.
Компания придерживается принципов устойчивого развития и стремится к постоянному совершенствованию своей продукции. Мы используем современные технологии и материалы, чтобы обеспечить высокую точность, надежность и долговечность наших модулей. Наш опыт работы с различными платформами и условиями эксплуатации позволяет нам предлагать решения, которые соответствуют самым высоким требованиям.
Мы постоянно совершенствуем наши методики калибровки и компенсации ошибок, чтобы обеспечить максимальную точность и надежность работы заводской триаксialный инерциальный навигационный модуль. Наша цель – предоставить нашим клиентам решения, которые позволяют им решать самые сложные задачи в области навигации и позиционирования.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 CAMPS43B
CAMPS43B -
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
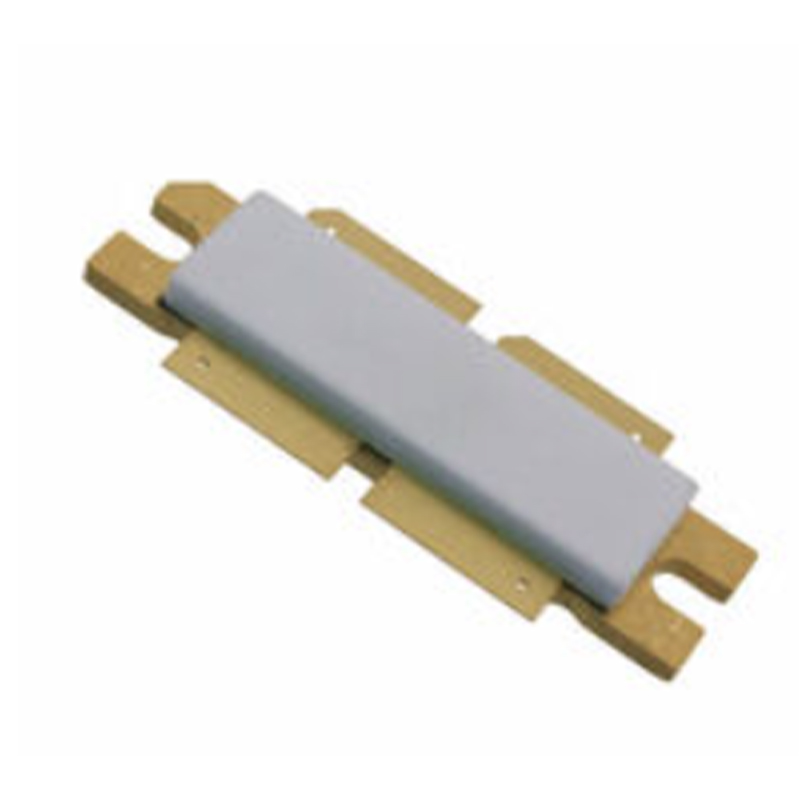 Радиочастотный силовой транзистор MRF8P29300HR6
Радиочастотный силовой транзистор MRF8P29300HR6 -
 Модуль передачи данных
Модуль передачи данных -
 CAMPS62
CAMPS62 -
 RSFK3670P019B1 FBAR-фильтр
RSFK3670P019B1 FBAR-фильтр -
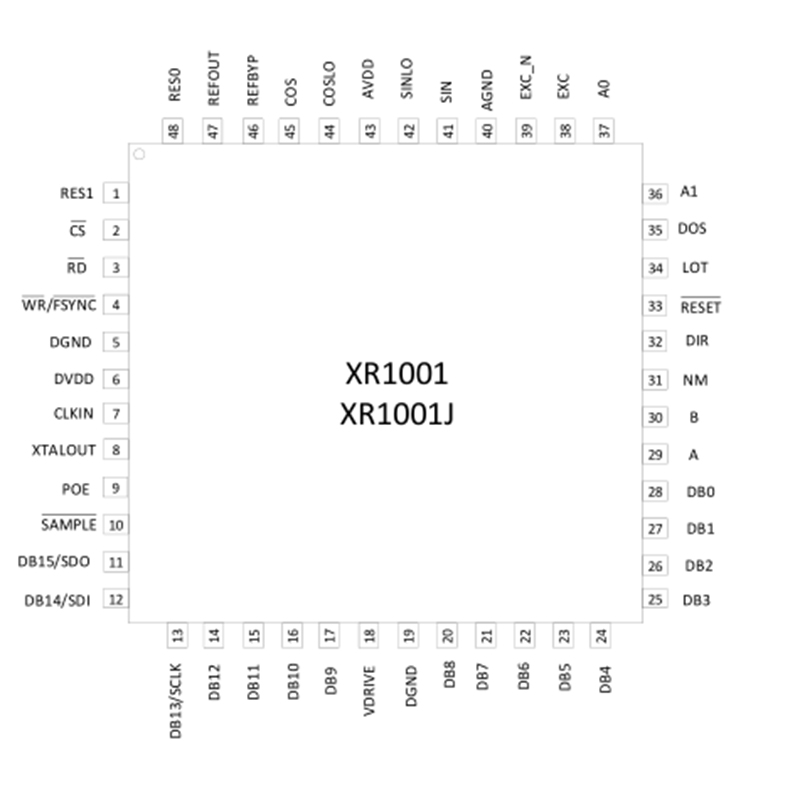 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 Модуль сбора и воспроизведения данных
Модуль сбора и воспроизведения данных -
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 CAXR188/2188/4188
CAXR188/2188/4188 -
 Датчик давления – Тип D
Датчик давления – Тип D
Связанный поиск
Связанный поиск- As20pt-500c высокоточный датчик температуры и давления заводы
- Бортовой трёхосевой интегрированный инерциальный навигационный модуль завод
- Китай широкополосный радиочастотный детектор производитель
- Интегрированный датчик температуры и давления для интернета вещей производитель
- Camps46/56 производители
- As20pt-500c высокоточный датчик температуры и давления производитель
- Китай монолитные fbar фильтры производитель
- Высококачественный оптический преобразователь
- Кастомизированный датчик давления заводы
- Оптический преобразователь с волоконно-оптической передачей производители

