
Бортовой трёхосевой интегрированный инерциальный навигационный модуль заводы
По сути, бортовой трёхосевой интегрированный инерциальный навигационный модуль заводы – это не просто 'деталь'. Это целая система, где каждый датчик, каждый процессор, каждая схема – это кусочек сложного пазла. Часто возникают ощущения, что мы разбираемся в принципах, но реальная проблема – это интеграция, это понимание, как все это работает *вместе* в реальных условиях полета или движения. Начали с простого – сбор данных с гироскопов и акселерометров, но в итоге приходилось бороться с дрейфом, с влиянием вибраций, с помехами. Нас часто спрашивают: 'А что, если...?'. И эта 'что, если' определяет весь подход к разработке и испытаниям.
Проблемы с дрейфом и его коррекция
Дрейф – это, пожалуй, самая большая головная боль при работе с ИН. Нельзя просто взять и сказать: 'Ну, он немного дрейфует'. Нужно понимать, *насколько* он дрейфует, *как* он дрейфует (линейно, нелинейно), и самое главное – *почему* он дрейфует. В наших первых проектах мы полагались на простые алгоритмы интеграции, а затем столкнулись с серьезной проблемой. Дрейф быстро накапливался, и точность определения положения ухудшалась экспоненциально. В итоге пришлось переходить к более сложным алгоритмам коррекции дрейфа, например, к использованиям Kalman-фильтров и интегрированию данных с GPS (если она доступна, разумеется).
Мы экспериментировали с разными подходами к минимизации дрейфа, в том числе с использованием специальных фильтров, учитывающих характеристики датчиков. Иногда удавалось добиться значительного улучшения, но всегда оставалась какая-то погрешность. Казалось, что ты отбрасываешь один дрейф, а взамен получаешь другой, более сложный.
Влияние внешних факторов и вибраций
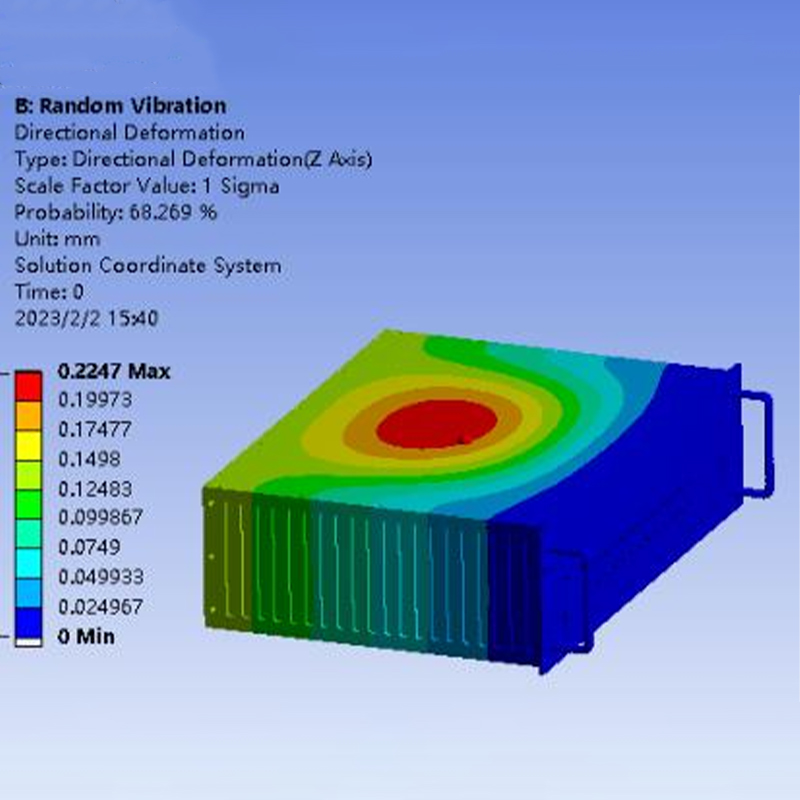
Еще один серьезный фактор – это вибрации. В условиях реального полета или движения на корпус модуля воздействуют значительные вибрации, которые влияют на точность измерения. Просто красивая теория, не учитывающая реальную картину мира – это путь к ошибкам. Мы применяли различные методы фильтрации сигналов, чтобы подавить влияние вибраций, но эффективность этих методов сильно зависела от частотного спектра вибраций.
Например, в одном из проектов, связанном с разработкой ИН для дронов, мы столкнулись с проблемой сильных вибраций мотора. Простые фильтры не справлялись, и мы были вынуждены использовать более сложные алгоритмы, учитывающие характеристики вибраций и особенности работы датчиков. В конечном итоге, удалось добиться приемлемой точности, но потребовалось значительное время и ресурсы.
Выбор компонентов и их характеристики
Выбор компонентов – это тоже очень важный момент. Нельзя просто взять самые дешевые гироскопы и акселерометры и надеяться на успех. Нужно учитывать их характеристики, такие как точность, стабильность, температурный диапазон и устойчивость к вибрациям. В наших проектах мы часто выбираем компоненты, разработанные специально для использования в авиационной и космической технике.
При выборе датчиков мы обращаем внимание не только на их технические характеристики, но и на их совместимость. Разные производители используют разные технологии, и их датчики могут не сочетаться друг с другом. Поэтому важно тщательно тестировать систему в целом, чтобы убедиться в ее работоспособности. Мы работаем с несколькими производителями, чтобы иметь возможность выбирать оптимальные компоненты для каждого проекта.
Особенности интеграции различных датчиков
Интеграция гироскопов и акселерометров требует особого внимания к синхронизации и калибровке. Неправильная синхронизация может привести к значительным ошибкам в определении ориентации и положения. Кроме того, необходимо учитывать температурные изменения, которые могут влиять на характеристики датчиков.
Мы используем специальные методы калибровки, чтобы компенсировать погрешности, связанные с температурными изменениями и другими факторами. Также мы применяем алгоритмы адаптивной фильтрации, которые позволяют автоматически корректировать параметры системы в зависимости от текущих условий эксплуатации.
Например, в одном из наших проектов мы разработали систему автоматической калибровки, которая позволяет проводить калибровку ИН в полевых условиях. Это позволяет снизить время на настройку системы и повысить ее надежность.
Опыт с разными типами модулей
Мы работали с разными типами бортовых трёхосевых интегрированных инерциальных навигационных модулей заводы: от небольших, предназначенных для использования в дронах, до крупных, используемых в авиационной технике. В каждом случае возникали свои проблемы и задачи. Для дронов важнее всего – это компактность и низкий вес, а для авиационной техники – это высокая точность и надежность.
Например, один из наших первых проектов связан с разработкой ИН для беспилотного летательного аппарата. Нам нужно было создать систему, которая была бы легкой, компактной и при этом достаточно точной, чтобы обеспечить стабильный полет. Мы использовали небольшие гироскопы и акселерометры, а также разработали специальный алгоритм обработки данных, который позволял компенсировать влияние вибраций. В итоге, нам удалось создать систему, которая полностью соответствовала требованиям проекта.
В более поздних проектах, связанных с разработкой ИН для авиационной техники, мы использовали более мощные и точные датчики. Также мы уделяли особое внимание вопросам защиты от внешних воздействий, таким как вибрации и электромагнитные помехи. В итоге, нам удалось создать систему, которая полностью соответствовала требованиям авиационных стандартов.
Будущее развития
Сейчас мы активно работаем над новыми технологиями, которые позволят повысить точность и надежность бортовых трёхосевых интегрированных инерциальных навигационных модулей заводы. В частности, мы исследуем возможности использования искусственного интеллекта для обработки данных с датчиков и автоматической калибровки системы. Также мы работаем над созданием более компактных и энергоэффективных модулей, которые будут использоваться в дронах и других мобильных устройствах.
Нам кажется, что будущее ИН – это интеграция с другими системами навигации, такими как GPS и GLONASS. Это позволит создать более точную и надежную систему определения положения, которая будет работать в любых условиях. Мы также надеемся, что в будущем появятся новые типы датчиков, которые позволят еще больше повысить точность и надежность ИН.
Примеры успешных кейсов
Мы успешно реализовали несколько проектов по разработке ИН для различных приложений. Например, для производства беспилотных летательных аппаратов (БПЛА) мы разработали компактный и легкий модуль, который обеспечивает высокую точность определения положения и ориентации. Этот модуль используется в дронах для фото- и видеосъемки, а также для доставки грузов.
Кроме того, мы разрабатываем ИН для морских судов и авиационных аппаратов. Эти модули отличаются высокой надежностью и устойчивостью к внешним воздействиям.
Наше предприятие постоянно работает над улучшением качества продукции и расширением спектра предоставляемых услуг. Мы уверены, что сможем удовлетворить потребности самых требовательных клиентов.
В целом, работа с бортовым трёхосевым интегрированным инерциальным навигационным модулем заводы – это непрерывный процесс, требующий глубоких знаний и опыта. Это постоянное решение проблем, экспериментов и итераций. И, конечно, желания двигаться вперед.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Датчик давления – Тип C
Датчик давления – Тип C -
 CAMPS43B
CAMPS43B -
 RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр -
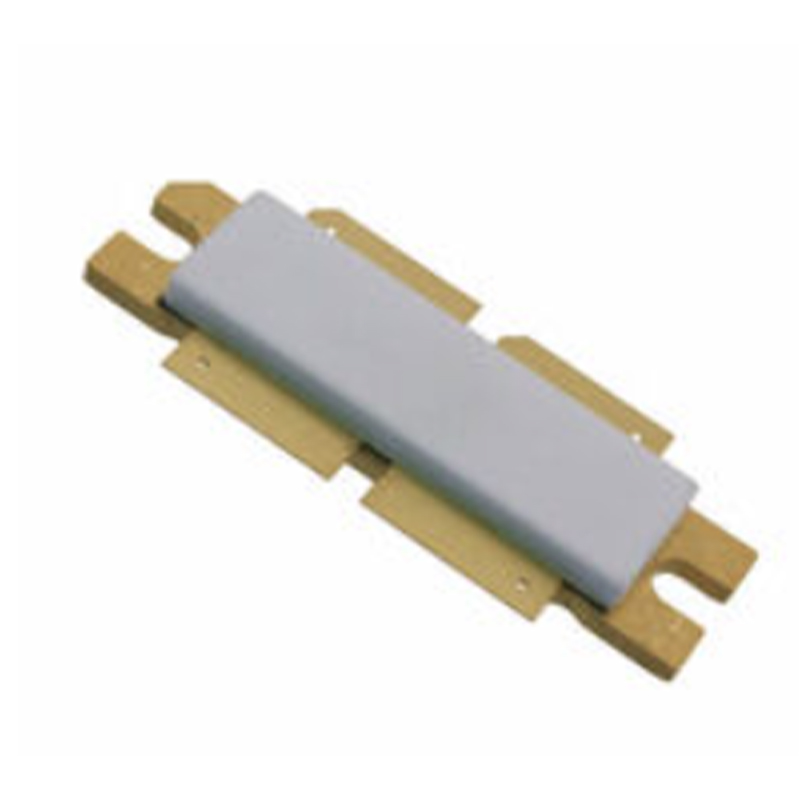 Радиочастотный силовой транзистор MRF8P29300HR6
Радиочастотный силовой транзистор MRF8P29300HR6 -
 CAMPS49
CAMPS49 -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный -
 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
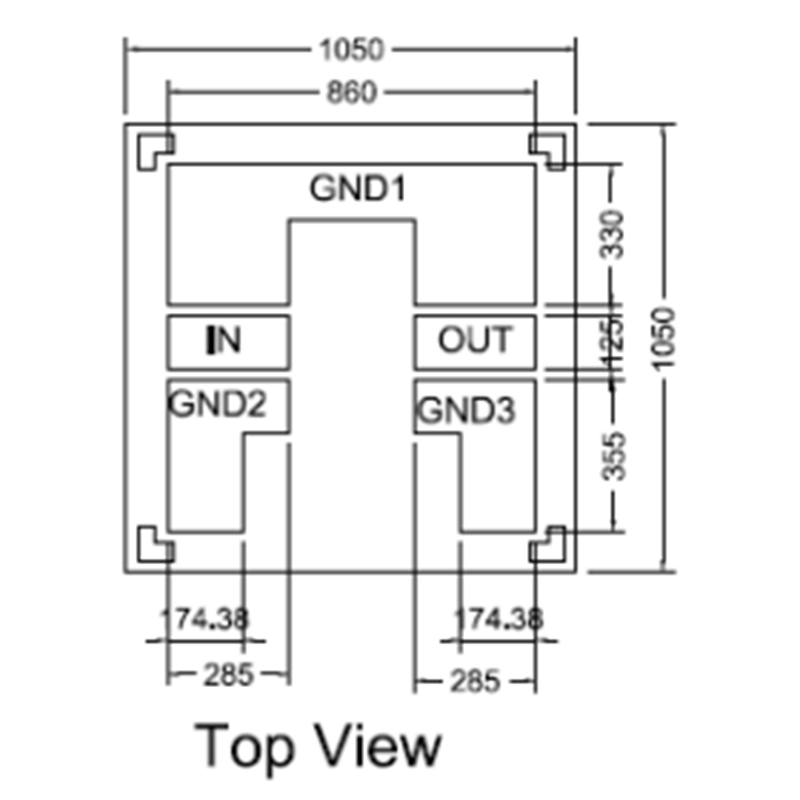
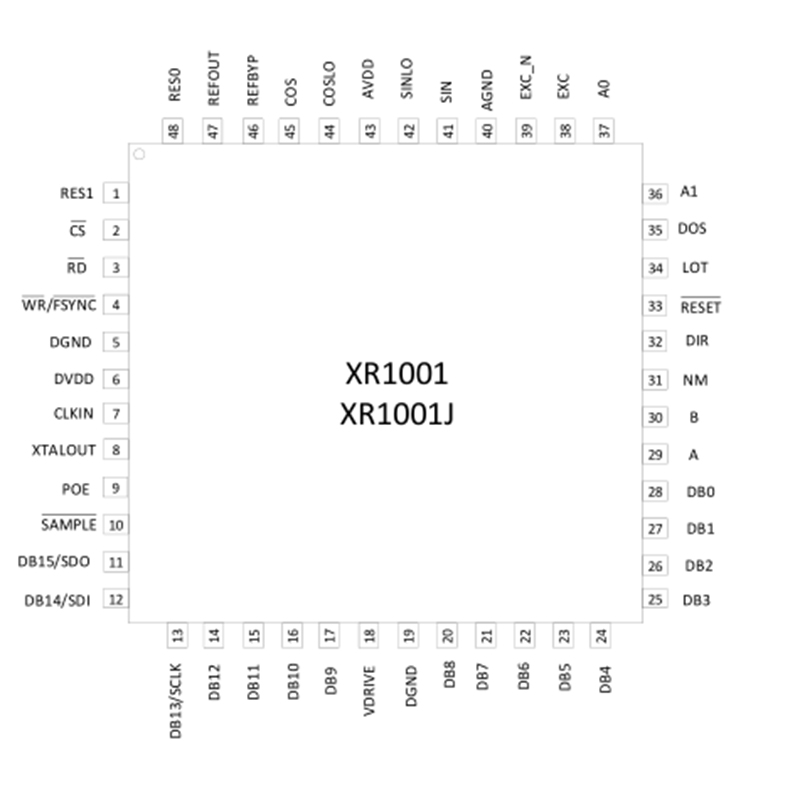 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 RSFK3670P019B1 FBAR-фильтр
RSFK3670P019B1 FBAR-фильтр -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль
Связанный поиск
Связанный поиск- Высокоточный измерительный инерциальный блок завод
- Платформа коммуникационного модуля завод
- Низковольтный силовой транзистор
- Биполярный силовой транзистор производители
- Модуль сбора и воспроизведения рч-сигналов производители
- Модуль высокоскоростной обработки сигналов
- Специализированный самокалибрующийся датчик давления заводы
- Оптический преобразователь производители
- Датчик давления as20h-30 завод
- Отечественные интегральные схемы заводы

