
Высокоточный комбинированный инерциальный навигационный модуль завод
Высокоточный комбинированный инерциальный навигационный модуль завод... Уже звучит как что-то из научно-фантастического фильма, не правда ли? Но это реальность, и реальность, с которой мы сталкиваемся каждый день. Многие считают, что разработка и производство таких систем – это исключительно работа крупных корпораций, с огромными бюджетами и передовыми технологиями. Это, конечно, так, но я бы сказал, что настоящая ценность – в умении решать конкретные задачи, оптимизировать процессы и адаптировать готовые решения под нужды заказчика. И это, как правило, задача для более гибких, специализированных компаний, таких как ООО Сиань Чэнань Измерение и Контроль Технологии. Мы занимаемся этим, и опыт наш... интересный. Начнем с того, что понятие 'высокоточный' само по себе требует пристального внимания к деталям. Стремление к сантиметровой точности в условиях реального мира – это постоянная борьба с различными погрешностями, и от того, насколько успешно ты эту борьбу ведешь, зависит конечный результат. Поэтому давайте разберемся, что вообще стоит за этим сложным названием.
Что такое комбинированный инерциальный навигационный модуль?
В своей основе, комбинированный инерциальный навигационный модуль – это система, предназначенная для определения местоположения, скорости и ориентации объекта без использования внешних сигналов, таких как GPS. 'Инерциальный' означает, что система использует инерциальные датчики – акселерометры и гироскопы – для измерения ускорения и угловой скорости. На основе этих данных, с помощью сложных алгоритмов, вычисляется изменение положения объекта во времени. 'Комбинированный' означает, что обычно к инерциальной системе добавляются другие датчики, такие как магнитометры, барометры, датчики давления, а иногда даже визуальные датчики, чтобы повысить точность и надежность позиционирования. Нельзя просто взять инерциальную систему и ожидать, что она выдаст точные координаты – ее нужно калибровать, компенсировать погрешности и интегрировать с другими источниками информации.
Основная проблема, с которой мы сталкиваемся, – это дрейф. Инерциальные датчики не идеальны, они имеют небольшие погрешности, которые со временем накапливаются, приводя к отклонению в расчетах. Чтобы минимизировать дрейф, используются различные методы – от сложных фильтров Калмана до периодической калибровки системы по внешним сигналам (например, по GPS, когда это возможно). Но даже с этими мерами, добиться абсолютной точности невозможно. Важно понимать, что инерциальные системы предназначены для обеспечения позиционирования в ситуациях, когда GPS недоступен или ненадежен – в подземных объектах, в условиях радиоэлектронного подавления, в морских глубинах. И их задача – не дать заблудиться, а предоставить достаточно точную информацию для безопасного и эффективного управления.
Типы инерциальных датчиков и их особенности
Выбор датчиков – это критически важный этап. Акселерометры, например, бывают MEMS-датчики, которые компактны и недороги, но менее точны, чем более дорогие и сложные датчики на основе кремния. Гироскопы также различаются по точности, стабильности и температурной зависимости. Выбор зависит от требуемой точности, бюджета и условий эксплуатации. Например, для полетов в самолетах обычно используются высокоточные гироскопы с низким уровнем шума, а для наземного транспорта – более экономичные, но менее чувствительные датчики. Мы часто работаем с интегрированными модулями, которые объединяют несколько датчиков и калибровочные схемы в одном корпусе. Это упрощает интеграцию системы и повышает ее надежность.
Калибровка датчиков – это еще один важный аспект. Датчики требуют регулярной калибровки для компенсации нелинейности, температурной зависимости и других погрешностей. Существуют различные методы калибровки – от ручной, с использованием специализированного оборудования, до автоматической, с использованием алгоритмов, встроенных в систему управления. Мы разработали собственный алгоритм автоматической калибровки, который позволяет снизить влияние внешних факторов и повысить точность позиционирования. Этот алгоритм интегрирован в наш комбинированный инерциальный навигационный модуль, что значительно упрощает его использование.
Применение в различных отраслях
Применение таких систем чрезвычайно разнообразно. От навигационных систем для беспилотных летательных аппаратов (БПЛА) до систем управления движением автономных транспортных средств, от систем навигации для подводных аппаратов до систем для точного земледелия. В авионике, как правило, требуется максимальная надежность и точность, так как от этого зависит безопасность полета. В робототехнике, инерциальные системы используются для ориентирования роботов в пространстве, контроля их движения и предотвращения столкновений. В судостроении, комбинированный инерциальный навигационный модуль является критически важным элементом системы навигации, особенно в условиях, когда GPS недоступен. Мы часто получаем запросы на разработку систем для специфических задач – например, для мониторинга состояния крупных строительных объектов или для точного позиционирования оборудования в производственных цехах.
Опыт и трудности при производстве
Производство комбинированного инерциального навигационного модуля – это сложный процесс, требующий высококвалифицированного персонала и современного оборудования. Нам приходится работать с чувствительными компонентами, такими как MEMS-датчики и высокоточные гироскопы, которые требуют специальных условий хранения и обработки. Одной из основных трудностей является интеграция различных компонентов в единую систему и обеспечение их совместимости. Также, важным аспектом является обеспечение надежности системы в условиях вибрации, ударов и экстремальных температур. Мы используем различные методы защиты компонентов – герметизацию, виброизоляцию и термическую защиту. Наш опыт показывает, что одной из самых больших проблем является обеспечение стабильности системы при длительной эксплуатации. Это требует постоянного мониторинга, диагностики и обслуживания.
При одном из проектов мы столкнулись с проблемой повышенного уровня шума в гироскопе. Это приводило к значительным погрешностям в расчетах и снижению точности позиционирования. Мы провели тщательный анализ системы, выявили источник шума и заменили гироскоп на более качественный. Также, мы оптимизировали алгоритм обработки данных, чтобы минимизировать влияние шума. В итоге, нам удалось значительно повысить точность системы и обеспечить ее стабильную работу в течение длительного времени. Этот опыт научил нас важности детального анализа и постоянной оптимизации.
Перспективы развития
Развитие технологий комбинированного инерциального навигационного модуля идет очень быстро. Появляются новые типы датчиков – MEMS-гироскопы с повышенной точностью и стабильностью, оптические гироскопы, инерциальные системы с использованием микроволновых технологий. Также, активно развиваются алгоритмы обработки данных, основанные на машинном обучении и искусственном интеллекте. В будущем, мы ожидаем появления более компактных, легких и энергоэффективных систем, которые будут обладать высокой точностью и надежностью. Мы видим большие перспективы в области интеграции инерциальных систем с другими сенсорными технологиями – например, с визуальными датчиками и датчиками давления. Это позволит создать более совершенные и универсальные системы позиционирования, которые будут решать широкий спектр задач.
ООО Сиань Чэнань Измерение и Контроль Технологии активно участвует в разработке новых технологий в этой области. Мы сотрудничаем с ведущими научно-исследовательскими институтами и университетами, участвуем в международных конференциях и выставках. Мы стремимся быть в курсе последних достижений в области навигационных систем и предлагать нашим клиентам самые современные и эффективные решения.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 CAMPS43B
CAMPS43B -
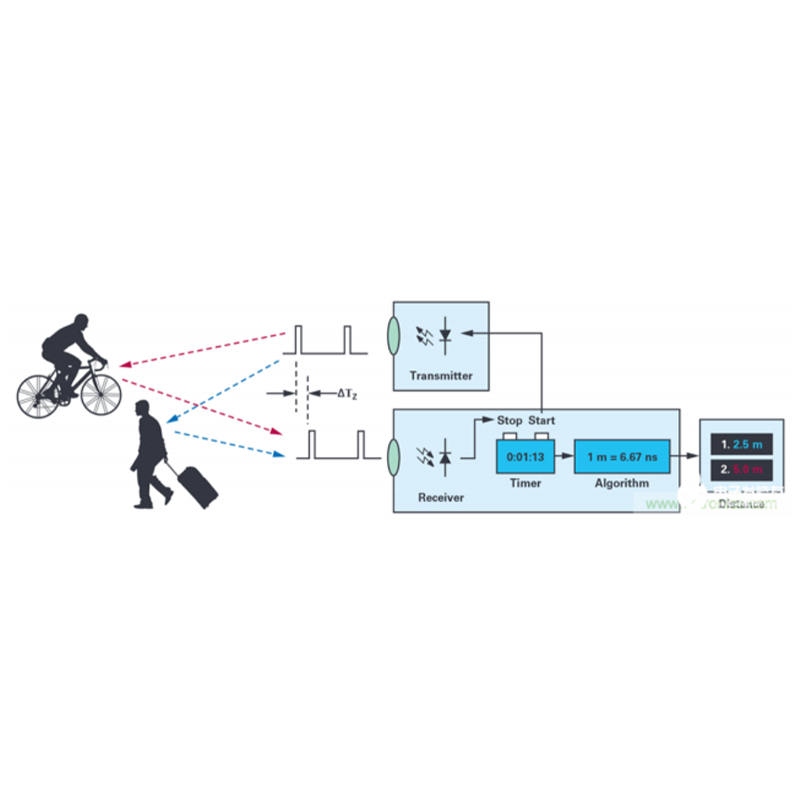 CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров
CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров -
 Датчик давления – Тип B
Датчик давления – Тип B -
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B -
 CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц
CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц -
 Радиочастотный силовой транзистор MRFE6VP100HR5
Радиочастотный силовой транзистор MRFE6VP100HR5 -
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль -
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 CAXR188/2188/4188
CAXR188/2188/4188 -
 CAMPS49
CAMPS49 -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный
Связанный поиск
Связанный поиск- As20pt-500a высокоточный датчик температуры и давления производители
- Китай быстрый цифровой преобразователь производитель
- Китай оптический преобразователь для систем видеонаблюдения производитель
- Китай комплексный тестер бпла производитель
- Трехосный гироскопический модуль чаочжи sigm9030r производители
- Специализированный беспроводной самоорганизующийся датчик давления заводы
- Китай специализированный беспроводной самоорганизующийся датчик давления производитель
- Специализированный датчик давления для экстремальных температур завод
- Китай точный цифро-аналоговый преобразователь производитель
- Силовые транзисторы ресанта производитель

