
Высокоточный комбинированный инерциальный навигационный модуль заводы
Заводы, производящие высокоточный комбинированный инерциальный навигационный модуль, – это не просто сборка компонентов. Это целая экосистема, требующая глубокого понимания физики, электроники, механики и, конечно, программного обеспечения. Часто встречаются заблуждения: 'Собрал – работает'. Это, мягко говоря, не совсем так. Навигация – это всегда компромисс между точностью, стоимостью и габаритами. И каждый раз приходится искать этот золотой баланс, часто методом проб и ошибок. У нас в компании ООО Сиань Чэнань Измерение и Контроль Технологии (https://www.xacamc.ru) уже более десяти лет занимаемся этой темой, и могу сказать, что здесь нет простых решений.
Проблемы с калибровкой и компенсацией погрешностей
Самая головная боль – это, безусловно, калибровка. Инерциальные системы, вне зависимости от уровня точности, подвержены систематическим и случайным ошибкам. Эти ошибки возникают из-за температурных изменений, вибраций, ускорений и других факторов. Простое 'подкручивание' параметров не решает проблему, нужен комплексный подход. Мы используем сложные алгоритмы для компенсации этих ошибок, учитывающие особенности конкретного оборудования и условия эксплуатации. Особенно сложно это сделать для модулей, предназначенных для работы в условиях сильных перегрузок или экстремальных температур. При этом, не стоит забывать про периодическую калибровку в полевых условиях. Хотя бы раз в несколько месяцев, чтобы убедиться, что система продолжает давать корректные результаты. Мы используем для этого специализированные калибровочные стенды и программное обеспечение, разработанное собственными инженерами.
Запомнился случай, когда мы поставляли модуль для роботизированной платформы, работающей на нефтедобыче. В процессе эксплуатации, несмотря на все наши расчеты и алгоритмы компенсации, точность системы постепенно ухудшалась. Оказалось, что на платформе создаются специфические вибрации, которые не были учтены в первоначальных расчетах. Пришлось проводить дополнительную калибровку и перенастраивать алгоритмы фильтрации данных. В итоге, проблема была решена, но это потребовало значительных временных и ресурсных затрат. Это показывает, что инерциальная навигация – это не статичная система, требующая постоянного мониторинга и адаптации.
Выбор сенсорной комбинации: гироскопы, акселерометры и звездные датчики
Выбор сенсорной комбинации – это ключевой момент при разработке комбинированного инерциального навигационного модуля. Гироскопы и акселерометры – это 'классика жанра', обеспечивающая высокую точность в краткосрочной перспективе. Однако, они подвержены дрейфу, который со временем накапливается и приводит к значительным ошибкам. Поэтому часто используют звездные датчики (GPS, ГЛОНАСС), которые позволяют корректировать ошибки и обеспечивать высокую точность в долгосрочной перспективе. Но и здесь есть свои нюансы: в условиях плохой видимости (например, в городских условиях или в лесу) звездные датчики могут работать некорректно или вообще не работать. Именно поэтому часто используют гибридные системы, сочетающие в себе несколько типов сенсоров. Иногда добавляют барометрические высотомеры для более точной оценки высоты.
Мы часто сталкиваемся с ситуацией, когда заказчики хотят максимально упростить конструкцию, отказавшись от звездных датчиков. Считают, что инерциальной системы достаточно. Но, как правило, это приводит к снижению точности и увеличению времени позиционирования. В итоге, приходится возвращаться к более сложным решениям, что увеличивает стоимость и сложность системы. Поэтому при проектировании высокоточного комбинированного инерциального навигационного модуля необходимо тщательно оценивать все плюсы и минусы каждого типа сенсоров и выбирать оптимальную комбинацию для конкретной задачи.
Интеграция программного обеспечения и алгоритмы фильтрации
Нельзя недооценивать роль программного обеспечения. Качественные алгоритмы фильтрации данных – это залог высокой точности и надежности инерциальной навигации. Мы разрабатываем собственные алгоритмы, учитывающие особенности используемого оборудования и условия эксплуатации. Один из ключевых алгоритмов – это фильтр Калмана, который позволяет оценивать состояние системы на основе данных от нескольких сенсоров и учитывать погрешности измерений. Но даже самый совершенный фильтр не может компенсировать плохие данные от сенсоров. Поэтому очень важно использовать высококачественные сенсоры и проводить регулярную калибровку.
В прошлом мы работали над проектом, где использовался стандартный фильтр Калмана, который оказался неэффективным для наших условий. Оказалось, что данные от акселерометров содержат значительный шум, который не был учтен в алгоритме. Пришлось разрабатывать новый алгоритм фильтрации, который учитывал особенности данных от акселерометров и позволял значительно повысить точность системы. Это еще раз подтверждает, что программная часть комбинированного инерциального навигационного модуля не менее важна, чем аппаратная.
Вопросы масштабируемости и интеграции с другими системами
В современном мире навигационные системы часто интегрируются с другими системами, например, с системами управления роботами или беспилотными летательными аппаратами. Поэтому очень важно, чтобы высокоточный комбинированный инерциальный навигационный модуль был легко интегрируем с другими системами и мог обмениваться данными с ними в режиме реального времени. Мы используем открытые стандарты и протоколы связи, чтобы обеспечить совместимость наших модулей с различными платформами и системами. Кроме того, мы предлагаем гибкие API, которые позволяют заказчикам легко интегрировать наши модули в свои собственные системы.
Один из вызовов – это обеспечение надежной связи между высокоточным комбинированным инерциальным навигационным модулем и другими компонентами системы, особенно в условиях вибраций и электромагнитных помех. Мы используем защищенные каналы связи и методы фильтрации данных, чтобы минимизировать влияние этих помех. Кроме того, мы предлагаем различные варианты монтажа модулей, чтобы обеспечить их надежную фиксацию и защиту от внешних воздействий. Компания ООО Сиань Чэнань Измерение и Контроль Технологии активно развивается и постоянно работает над улучшением своих продуктов и услуг.
Перспективы развития и новые технологии
На рынке высокоточного комбинированного инерциального навигационного модуля постоянно появляются новые технологии. Например, активно развивается технология MEMS (Micro-Electro-Mechanical Systems), которая позволяет создавать компактные и недорогие гироскопы и акселерометры. Также появляются новые типы сенсоров, например, ионные сенсоры и магнитометры, которые могут использоваться для повышения точности и надежности навигационных систем. Мы внимательно следим за развитием этих технологий и постоянно внедряем их в наши продукты. Например, сейчас мы работаем над созданием нового поколения модулей на основе MEMS гироскопов с улучшенной стабильностью и низким уровнем дрейфа.
Будущее комбинированного инерциального навигационного модуля, на мой взгляд, связано с дальнейшим развитием искусственного интеллекта и машинного обучения. Эти технологии позволяют разрабатывать более сложные алгоритмы фильтрации данных и автоматической калибровки, что повышает точность и надежность навигационных систем. Кроме того, искусственный интеллект может использоваться для анализа данных от сенсоров и прогнозирования возможных ошибок, что позволяет предотвратить аварийные ситуации. Нам предстоит еще много работы, но мы уверены, что сможем создать навигационные системы, которые будут соответствовать самым высоким требованиям.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 CAMPS46/56
CAMPS46/56 -
 Трехосный гироскопический модуль Чаочжи SiGM9030R
Трехосный гироскопический модуль Чаочжи SiGM9030R -
 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
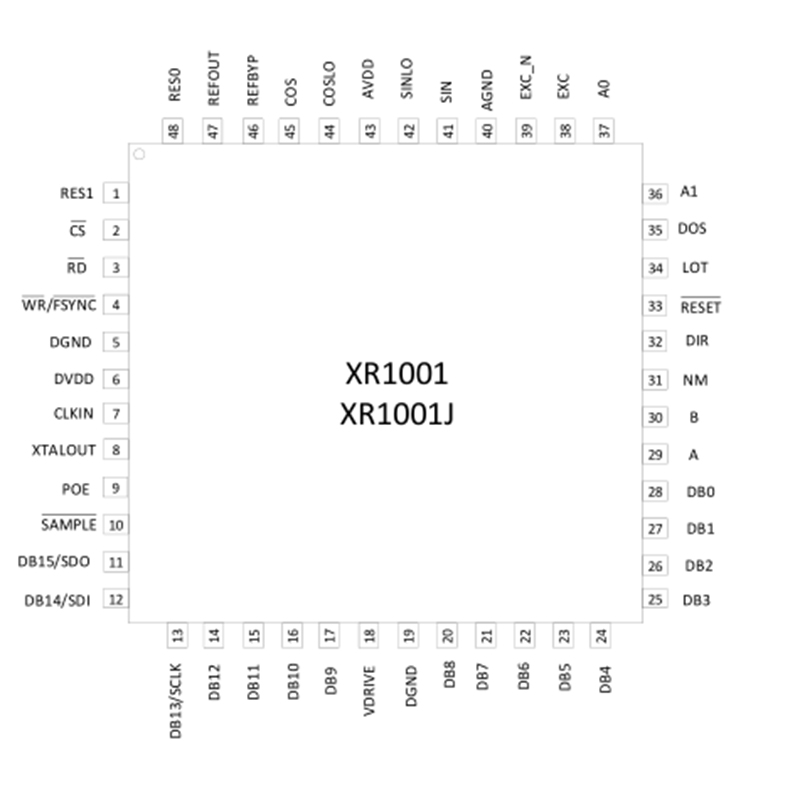 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 CAXR188/2188/4188
CAXR188/2188/4188 -
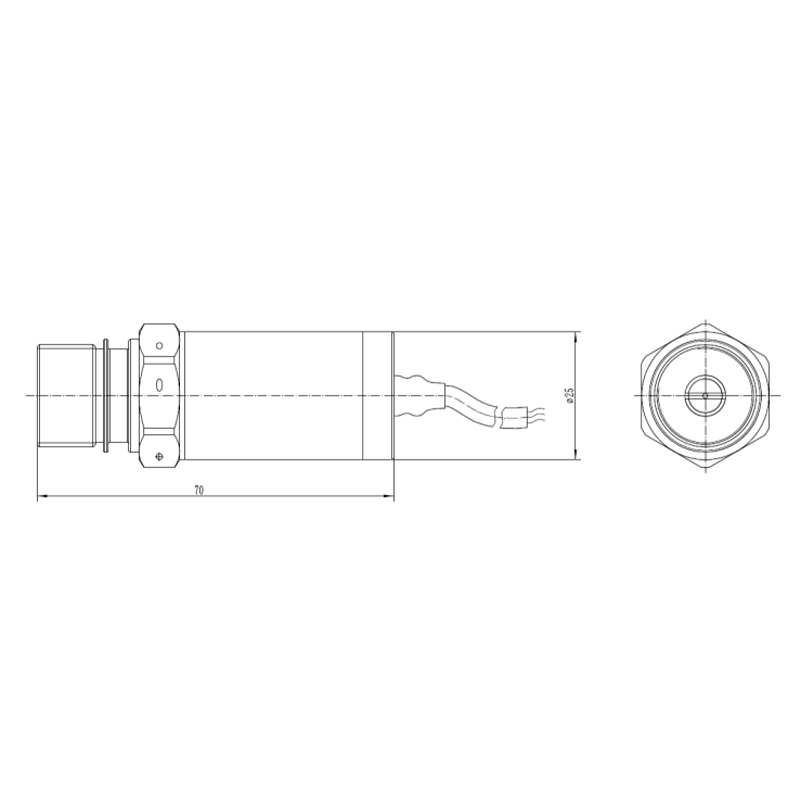
 Комбинированный датчик температуры и давления – Тип C
Комбинированный датчик температуры и давления – Тип C -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА -
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B -
 CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя
CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя -
 CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц
CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц -
 Датчик давления – Тип A
Датчик давления – Тип A -
 Радиочастотный силовой транзистор MRFE6VP100HR5
Радиочастотный силовой транзистор MRFE6VP100HR5
Связанный поиск
Связанный поиск- Высокоточный комбинированный датчик температуры и давления
- Специализированный датчик давления для космических условий завод
- Тактический инерциальный измерительный модуль заводы
- Радиочастотный силовой транзистор заводы
- Датчики избыточного давления купить заводы
- Специализированный датчик давления для ядерной промышленности производитель
- Китай датчик избыточного давления коммуналец производитель
- Модульные платы завод
- Промышленный высокоточный датчик температуры и давления as20pt-500a
- Датчики избыточного давления купить производители

