
Высокоточный mems-гироскопический модуль
Высокоточный MEMS-гироскопический модуль – это, казалось бы, простая вещь. Но на практике, это целый мир нюансов, подводных камней и не всегда очевидных компромиссов. Многие считают, что выбор сводится лишь к показателям точности и стабильности. Это, конечно, важно, но часто забывают о других, не менее критичных факторах. Попробую поделиться своими мыслями, основанными на многолетнем опыте работы с подобными датчиками – от разработки до интеграции в готовые решения.
Введение: за гранью цифр
С самого начала работы с MEMS-гироскопами, я убедился – цифры – это лишь отправная точка. Выдавать заявленные характеристики – это одно, а обеспечить их реальную стабильность и предсказуемость в реальных условиях – совсем другое. Зачастую, проблема не в самом датчике, а в его неправильной интеграции, неверном выборе калибровки или, что еще хуже, в недостаточной оценке внешних факторов, влияющих на его работу. Например, недооценивать влияние вибраций или температурных перепадов – верный путь к разочарованию. Мы однажды потратили несколько месяцев на оптимизацию алгоритмов обработки данных, а проблема оказалась в неправильной виброизоляции корпуса устройства, где размещен гироскоп.
Факторы, влияющие на точность и стабильность
Здесь нужно понимать, что 'точность' – это не единая характеристика. Это комплексное понятие, включающее в себя как случайные ошибки, так и систематические. Ошибки могут быть связаны с температурным дрейфом, изменением напряжения питания, внешними электромагнитными помехами и т.д. Именно поэтому при выборе датчика важно учитывать не только его заявленную точность, но и спектр потенциальных источников погрешностей. В идеале, нужно иметь возможность проводить калибровку датчика на месте эксплуатации, учитывая все возможные факторы, влияющие на его работу. Помню, когда разрабатывали систему стабилизации камеры для дрона, выяснилось, что даже небольшие колебания температуры сильно влияют на показания гироскопа. Пришлось добавить температурную компенсацию в алгоритм обработки данных, что потребовало значительных усилий.
Выбор подходящего MEMS-гироскопа для ваших задач
На рынке представлено огромное количество MEMS-гироскопов от разных производителей. Разные конструкции, разные диапазоны угловых скоростей, разная чувствительность к вибрациям и температурным перепадам. Выбор зависит от конкретной задачи. Для простых применений, таких как шаговые двигатели или стабилизация камеры в малоподвижных условиях, подойдет более простой и дешевый датчик. Но для более сложных задач, например, для навигации в условиях сильных вибраций или для точного управления роботом, потребуется более продвинутый датчик с высокой стабильностью и низким уровнем шума. Например, мы в ООО Сиань Чэнань Измерение и Контроль Технологии часто рекомендуем датчики от STMicroelectronics, благодаря их широкому ассортименту и хорошему соотношению цены и качества. У них есть модели с различной точностью и стабильностью, что позволяет выбрать оптимальный вариант для конкретной задачи. Наш опыт работы с их продукцией показывает, что они достаточно надежны и хорошо документированы.
Практические проблемы и решения
Процесс интеграции MEMS-гироскопа в готовое устройство – это не только выбор датчика, но и разработка схемы питания, калибровка датчика, написание алгоритмов обработки данных. И здесь возникают свои сложности. Например, некорректная схема питания может привести к дрейфу нуля или увеличению уровня шума. Калибровка датчика должна проводиться в условиях, максимально приближенных к условиям эксплуатации. И, конечно, важно тщательно продумать алгоритмы фильтрации данных, чтобы исключить ложные срабатывания и обеспечить стабильную работу системы. Мы однажды столкнулись с проблемой сильного дрейфа нуля у датчика, и выяснилось, что проблема была в некачественном стабилизаторе напряжения. Замена стабилизатора и перекалибровка датчика решили проблему.
Минимизация влияния внешних факторов
Одной из самых распространенных проблем при использовании MEMS-гироскопов является влияние внешних факторов, таких как вибрации и температурные перепады. Для минимизации этого влияния можно использовать различные методы, например, виброизоляцию корпуса датчика, температурную компенсацию в алгоритме обработки данных и использование алгоритмов фильтрации данных, устойчивых к шумам. Важно также учитывать географию эксплуатации. Если устройство будет использоваться в местах с экстремальными температурами, необходимо выбрать датчик с широким диапазоном рабочих температур и использовать соответствующую систему охлаждения.
Будущее MEMS-гироскопов: новые горизонты
Технологии MEMS-гироскопов постоянно развиваются. Появляются новые датчики с более высокой точностью, стабильностью и низким уровнем шума. Разрабатываются новые алгоритмы обработки данных, позволяющие повысить точность и надежность систем, использующих гироскопы. Особый интерес представляют разработки в области интеграции гироскопов с другими датчиками, такими как акселерометры и магнитометры, для создания комплексных систем навигации и контроля. ООО Сиань Чэнань Измерение и Контроль Технологии активно следит за новыми тенденциями в этой области и постоянно расширяет ассортимент предлагаемой продукции. Мы уверены, что MEMS-гироскопы будут играть все более важную роль в различных областях, от автомобильной промышленности до робототехники и аэрокосмической техники.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Модуль передачи данных
Модуль передачи данных -
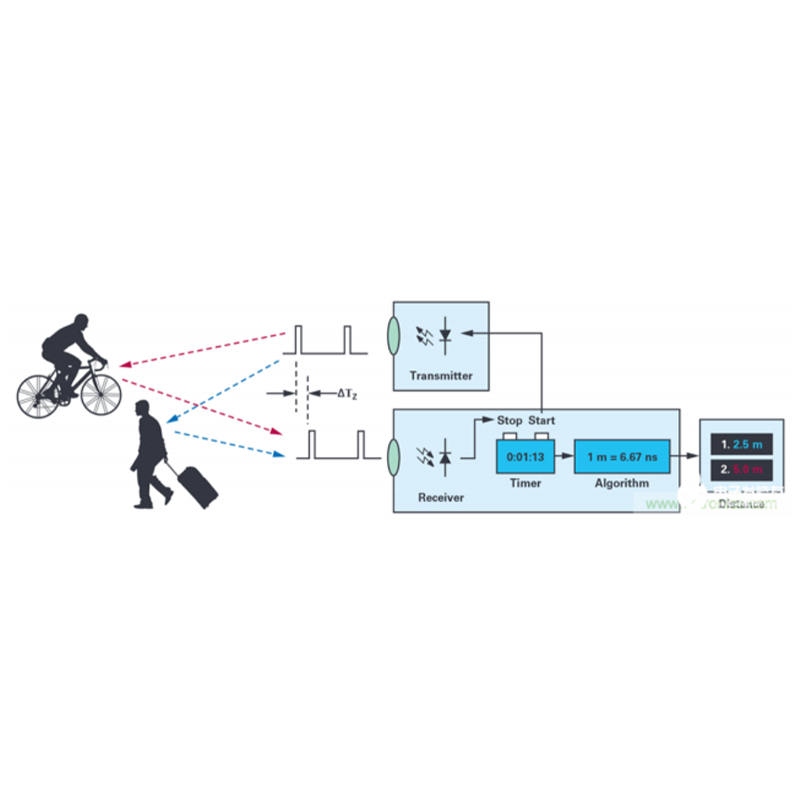 CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров
CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров -
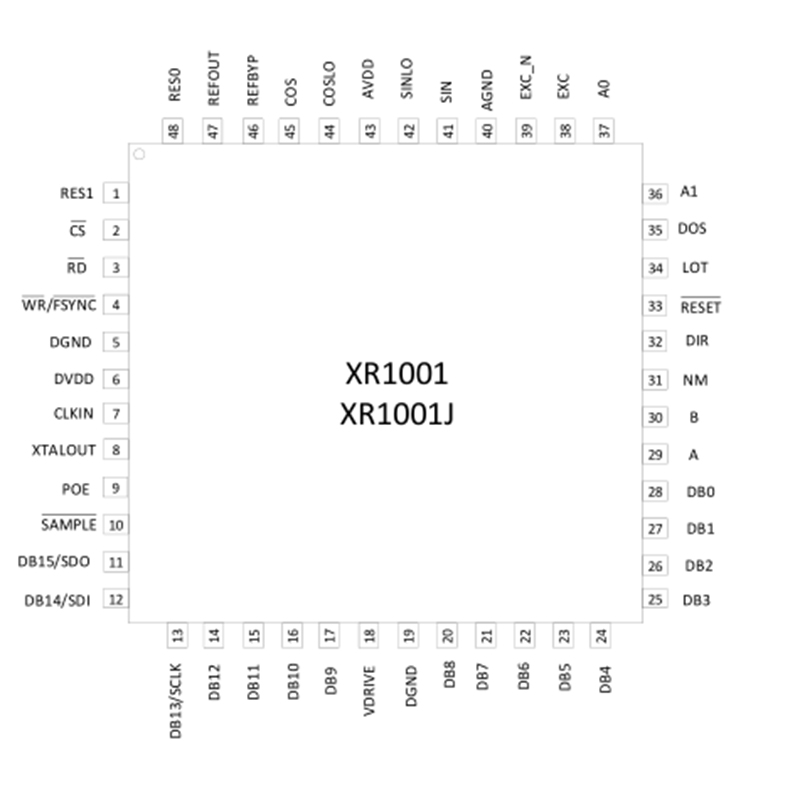 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
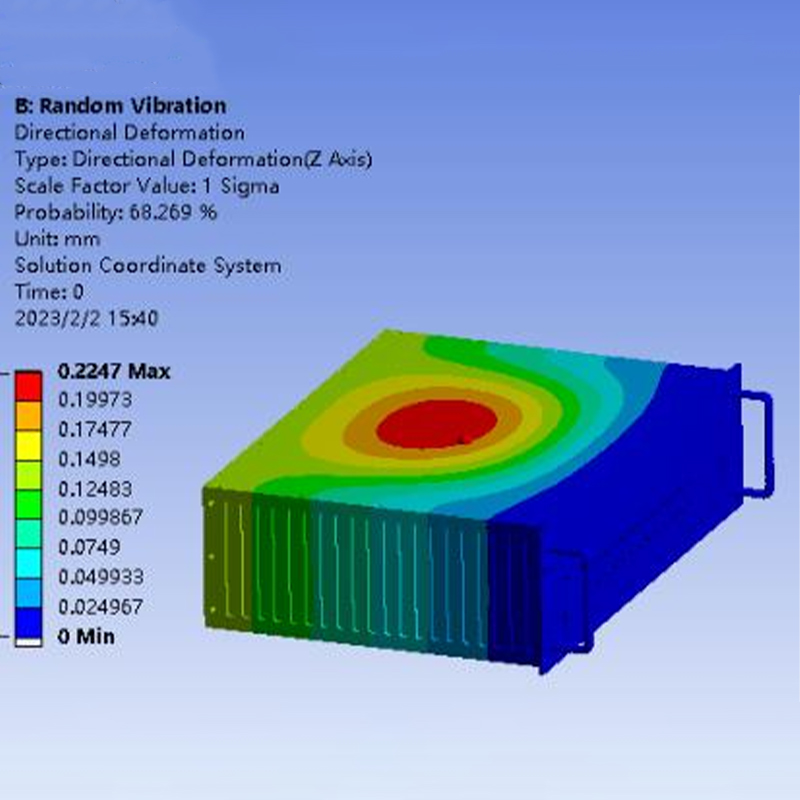
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный -
 CAXR188/2188/4188
CAXR188/2188/4188 -
 CAMPS62
CAMPS62 -
 CAMPS46/56
CAMPS46/56 -
 RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр -
 RSFK2492F009C1
RSFK2492F009C1 -
 Радиочастотный силовой транзистор MRF8P29300HR6
Радиочастотный силовой транзистор MRF8P29300HR6 -
 Трехосный гироскопический модуль Чаочжи SiGM9030R
Трехосный гироскопический модуль Чаочжи SiGM9030R
Связанный поиск
Связанный поиск- Модуль передачи данных завод
- Rsfk3670p019b1 fbar-фильтр
- Китай многоканальный модуль обработки сигналов производитель
- Специализированный самокалибрующийся датчик давления
- Военный силовой транзистор заводы
- Инерциальный измерительный блок для автономного вождения завод
- Китай бортовой трёхосевой интегрированный инерциальный навигационный модуль производитель
- Трубный комбинированный сенсор давления-температуры производители
- Китай силовые транзисторы ресанта производитель
- Интегрированный датчик температуры и давления для интернета вещей производители

