
Гироскопический модуль
Гироскопический модуль – это, на первый взгляд, простая вещь. Но как только дело доходит до реальных задач – будь то стабилизация камеры в дроне, ориентация робота в сложных условиях или точное определение угловой скорости в промышленном оборудовании – возникают тонкости, о которых часто не задумываются при первоначальном выборе. Многие подходят к покупке как к выбору простого датчика, не учитывая особенности его работы, погрешности, влияния внешних факторов. Хочу поделиться некоторыми наблюдениями и опытом, полученными за время работы с подобными устройствами. Это не теория, а реальные вещи, с которыми сталкиваешься каждый день.
Первые шаги: выбор и понимание
Итак, гироскопический модуль… Пожалуй, самая большая ошибка начинающих – это не понимать разницу между разными типами. У вас есть MEMS гироскопы (на микроэлектромеханических системах), волоконно-оптические гироскопы, жидкостные гироскопы… каждый из них имеет свои преимущества и недостатки. MEMS, конечно, сейчас самый популярный вариант – они компактные, недорогие. Но у них есть свой предел точности, особенно в условиях вибрации или сильных перегрузок. Волокно-оптические и жидкостные, напротив, гораздо точнее, но и гораздо дороже и габаритнее. Нужно понимать, для какой задачи нужен датчик.
Особенно часто встречается неверное представление о 'точности'. Производители заявляют об однолетней стабильности и минимальном дрейфе, но это часто относится к идеальным лабораторным условиям. В реальной эксплуатации, особенно если это дроны или автомобили, где есть вибрации и ускорения, даже небольшой дрейф может привести к существенным ошибкам в определении ориентации.
В нашей компании, ООО 'Сиань Чэнань Измерение и Контроль Технологии' (https://www.xacamc.ru), мы часто сталкиваемся с тем, что клиенты заказывают датчики с заявленной высокой точностью, а затем получают разочарование из-за нереалистичных ожиданий.
Проблемы с дрейфом и температурной стабильностью
Дрейф – это, пожалуй, самая распространенная проблема при работе с гироскопическими модулями. Он означает, что показания датчика со временем изменяются даже при неподвижности объекта. Это происходит из-за различных факторов, таких как температурные изменения, старение элементов датчика и внешние воздействия.
Мы работаем с большим количеством гироскопических модулей разных производителей, и каждый из них по-разному проявляет дрейф. Некоторые производители предоставляют таблицы дрейфа в зависимости от температуры, но даже эти таблицы не всегда отражают реальную картину. Часто приходится проводить собственные калибровки и компенсации дрейфа, чтобы добиться приемлемой точности.
Один из интересных случаев – работа с гироскопом в условиях экстремальных температур. Нам нужно было интегрировать гироскопический модуль в оборудование, которое эксплуатируется в пустынных регионах. Оказалось, что температурный дрейф становится критическим фактором. Пришлось использовать специальные алгоритмы компенсации дрейфа, основанные на термостатировании датчика и регулярной калибровке.
Влияние внешних факторов и фильтрация данных
Помимо дрейфа, на показания гироскопического модуля могут влиять и другие факторы, такие как вибрации, электромагнитные помехи и ускорения. Особенно это актуально для применений в движущихся системах, например, в дронах, роботах и автомобилях.
Для решения этой проблемы необходимо использовать эффективные методы фильтрации данных. Часто применяются цифровые фильтры, такие как фильтр Калмана или фильтр Винера. Выбор фильтра зависит от характеристик системы и требуемой точности. Фильтр Калмана, например, позволяет оценивать состояние системы на основе неточных измерений, учитывая при этом модель динамики системы. Это очень полезно, когда мы имеем дело с шумными показаниями гироскопа.
Кроме того, важно учитывать влияние вибраций на показания датчика. Для снижения влияния вибраций можно использовать специальные виброизоляторы или применять алгоритмы фильтрации, учитывающие частотный спектр вибраций. В некоторых случаях, когда вибрации слишком сильные, может потребоваться использование более точных, но и более дорогих гироскопов.
Реальные примеры применения и трудности внедрения
Мы участвовали в проекте по созданию автономного робота для работы в складском помещении. Основной задачей робота была навигация и предотвращение столкновений. Для этого использовался гироскопический модуль в сочетании с акселерометром и лидаром.
Первоначально мы столкнулись с проблемами при калибровке датчиков. Робот двигался по складскому помещению, и при этом показания гироскопа постоянно менялись, что затрудняло процесс калибровки. Пришлось разработать специальный алгоритм калибровки, который учитывал динамику движения робота. В итоге мы смогли добиться приемлемой точности навигации.
Еще одна сложность – интеграция гироскопического модуля с другими датчиками. Необходимо тщательно синхронизировать данные от разных датчиков, чтобы получить точную информацию о положении и ориентации робота. Это требует использования специальных протоколов связи и алгоритмов обработки данных.
Будущее гироскопических модулей: интеграция и новые возможности
Сейчас активно разрабатываются новые типы гироскопических модулей, такие как волоконно-оптические гироскопы и микроканальные гироскопы. Эти датчики обладают большей точностью и стабильностью, чем MEMS гироскопы, но и стоят дороже. В будущем, можно ожидать, что эти датчики станут более доступными и будут широко использоваться в различных приложениях.
Еще одним интересным направлением является интеграция гироскопических модулей с другими датчиками, такими как GPS, IMU и камеры. Это позволяет создавать более сложные и точные системы определения местоположения и ориентации.
Важным трендом является развитие алгоритмов обработки данных, которые позволяют компенсировать дрейф и другие ошибки. Использование машинного обучения и искусственного интеллекта позволит создавать более интеллектуальные системы, которые могут адаптироваться к изменяющимся условиям эксплуатации.
В заключение, хочется сказать, что гироскопический модуль – это не просто датчик угловой скорости, а важный компонент многих современных систем. Чтобы успешно применять гироскопические модули, необходимо понимать их особенности, учитывать влияние внешних факторов и использовать эффективные методы фильтрации данных. И, конечно, не стоит переоценивать заявленную производителем точность.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
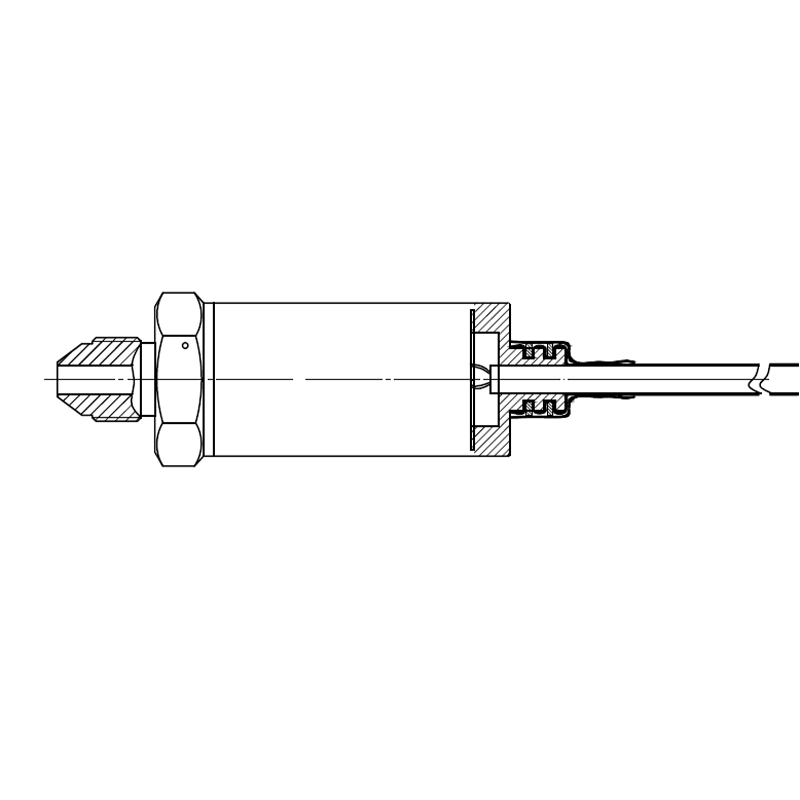
 Комбинированный датчик температуры и давления – Тип C
Комбинированный датчик температуры и давления – Тип C -
 CAMPS62
CAMPS62 -
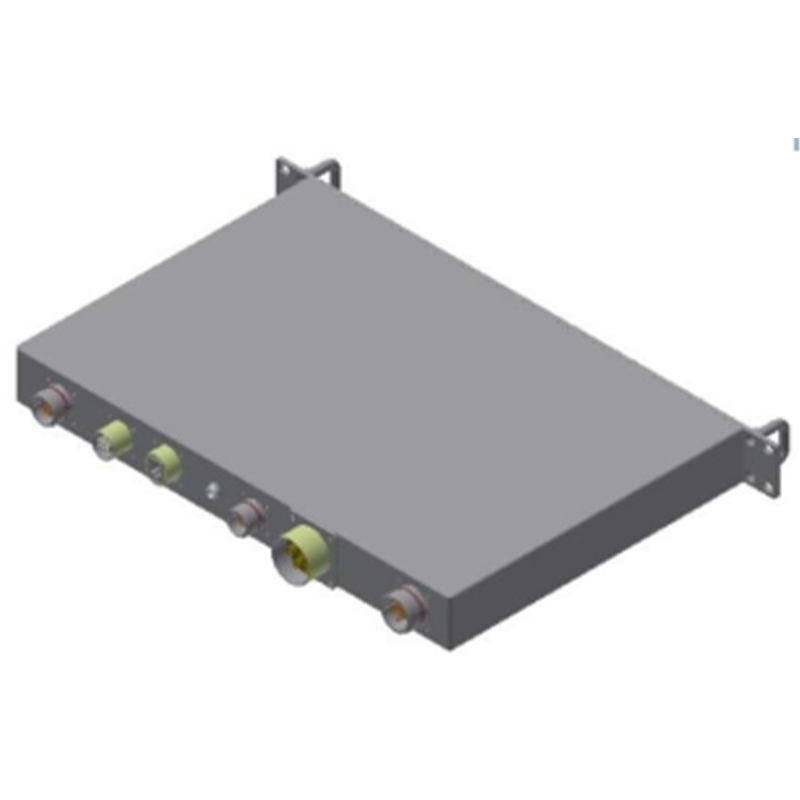 Оптический преобразователь с дисплейным управлением
Оптический преобразователь с дисплейным управлением -
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B -
 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
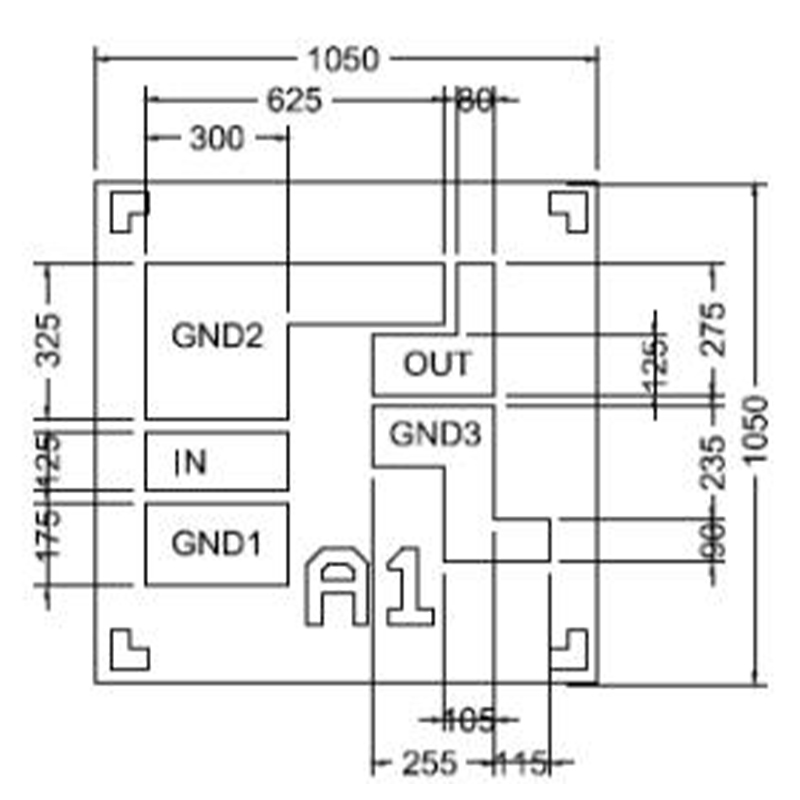
 CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц
CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА
Связанный поиск
Связанный поиск- Датчик избыточного давления 4 20ма завод
- Высоконадежный датчик давления
- Низковольтный силовой транзистор производитель
- Rsfk3670p019b1 fbar-фильтр производители
- Многоканальный оптический преобразователь производители
- Анализатор сигналов заводы
- Комбинированный оптический преобразователь 20-ти канальный заводы
- Датчик давления as20h-450 производитель
- Датчики измерения избыточного давления завод
- As20pt-500b высокоточный датчик температуры и давления производитель

