
Измерительный инерциальный блок
Сразу скажу: тема измерительного инерциального блока (ИИБ) – это не просто набор датчиков и вычислителя. Это целый комплекс инженерных решений, где точность и надежность критически важны. Часто вижу, как проекты терпят крах из-за неправильного выбора или неверной интеграции ИИБ. Решил поделиться опытом, чем можно наткнуться на практике, о каких моментах стоит задуматься. В основном речь пойдет об авиационных и космических применениях, там требования к точности просто чудовищные, но принципы схожи и в других областях.
Что такое измерительный инерциальный блок на самом деле?
Вроде бы просто “инерциальный блок”, но что за ним стоит? В основном, это комбинация акселерометров, гироскопов и магнитометров (или их комбинаций) – датчиков, измеряющих ускорение, угловую скорость и магнитное поле. Вычислительная часть обрабатывает эти данные, выдавая ориентацию, скорость и положение объекта в пространстве. Каждый из этих компонентов имеет свои характеристики, свои погрешности, свои особенности работы. Важно понимать, что погрешность одного датчика может существенно повлиять на общую точность системы. К тому же, современные ИИБ часто включают в себя алгоритмы фильтрации и калибровки, которые позволяют уменьшить влияние шумов и ошибок.
В отличие от, скажем, GPS, ИИБ работает автономно. GPS требует видимости спутников, а ИИБ может функционировать в любых условиях, даже в космосе или под водой. Но это и его слабость – ошибки накапливаются со временем, поэтому необходима регулярная калибровка и, при необходимости, коррекция положения. Калибровка – это отдельная сложная процедура, требующая специализированного оборудования и программного обеспечения. Мы в ООО Сиань Чэнань Измерение и Контроль Технологии (https://www.xacamc.ru/) предлагаем комплексные решения по калибровке и тестированию ИИБ, включая использование наших собственных разработок. (Компания основана в 2011 году и специализируется на следующих технологических направлениях: сбор данных и обработка сигналов, авионика, электромеханическое управление, а также новые интеллектуальные датчики. Основное направление деятельности — поставка электронного оборудования, компонентов и научно-исследовательских комплектующих, устойчивых к экстремальным условиям эксплуатации. Компания сформировала профессиональную сервисную систему, объединяющую маркетинг, разработку, производство, поставку и обслуживание продукции.)
Типы датчиков и их особенности
Акселерометры бывают пироэлектрические, пирорезистивные, MEMS. Каждый тип имеет свои преимущества и недостатки: пироэлектрические отличаются высокой чувствительностью, но требуют питания; пирорезистивные – более простые в реализации, но менее точные; MEMS – компактные и надежные, но могут быть подвержены влиянию температуры и вибрации. Гироскопы также бывают разных типов – MEMS, волоконно-оптические, капиллярные. MEMS гироскопы, опять же, компактны и дешевы, но у них есть проблема – магнитный даунсцинтинг, то есть влияние магнитного поля на показания датчика. Магнитометры – это, по сути, датчики магнитного поля, которые используются для определения ориентации по отношению к земному магнитному полю.
Очень часто в реальных системах используется комбинация разных типов датчиков для повышения точности и надежности. Например, акселерометры используются для измерения ускорения, гироскопы – для измерения угловой скорости, а магнитометры – для определения ориентации. Используя данные от всех этих датчиков, можно построить более точную и устойчивую систему.
Проблемы интеграции ИИБ
Одна из самых распространенных проблем – это электромагнитные помехи. ИИБ – это чувствительное устройство, которое может быть легко подвержено влиянию электромагнитных помех от других устройств, расположенных рядом. Это особенно актуально в авиации, где в салоне и в кабине самолета находится множество электронных устройств. Для решения этой проблемы необходимо использовать экранирование, фильтрацию и другие методы защиты от помех.
Другая проблема – это температурная стабильность. Температура может существенно влиять на показания датчиков, поэтому необходимо использовать датчики с низким температурным коэффициентом и обеспечить стабильную температуру окружающей среды. В некоторых случаях требуется активное охлаждение или обогрев ИИБ.
Калибровка и компенсация ошибок
Калибровка ИИБ – это сложный процесс, который требует специализированного оборудования и программного обеспечения. Калибровка заключается в определении и компенсации погрешностей датчиков и алгоритмов обработки данных. Существует несколько методов калибровки, включая статическую калибровку (когда ИИБ находится в неподвижном состоянии) и динамическую калибровку (когда ИИБ подвергается воздействию ускорений и угловых скоростей).
Необходимо учитывать, что калибровка – это не одноразовая процедура, а непрерывный процесс. По мере эксплуатации ИИБ накапливает погрешности, поэтому необходимо регулярно проводить калибровку.
Практические примеры и ошибки
Например, в одном из проектов, с которыми мы работали, ИИБ был установлен на дроне для выполнения фотограмметрической съемки. В результате, из-за недостаточной защиты от электромагнитных помех, данные, полученные с ИИБ, были сильно искажены, и результаты съемки оказались непригодными для использования. Пришлось переделывать всю систему, установив дополнительное экранирование.
Еще одна типичная ошибка – неправильный выбор алгоритма фильтрации. Существует множество различных алгоритмов фильтрации, и выбор подходящего алгоритма зависит от конкретных требований задачи. Например, для стабилизации изображения может использоваться фильтр Калмана, а для снижения шумов – фильтр медиан. Неправильный выбор алгоритма фильтрации может привести к снижению точности и надежности системы.
Перспективы развития
Современные исследования в области измерительных инерциальных блоков направлены на повышение точности, надежности и энергоэффективности этих устройств. Особое внимание уделяется разработке новых типов датчиков и алгоритмов обработки данных. В будущем ИИБ станут еще более компактными, дешевыми и доступными.
Также активно развивается направление интеграции ИИБ с другими системами, такими как GPS, IMU (инерциальный измерительный блок), визуальные системы и т.д. Это позволяет создавать более сложные и функциональные системы навигации и ориентации.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Радиочастотный силовой транзистор AFT31150NR5
Радиочастотный силовой транзистор AFT31150NR5 -
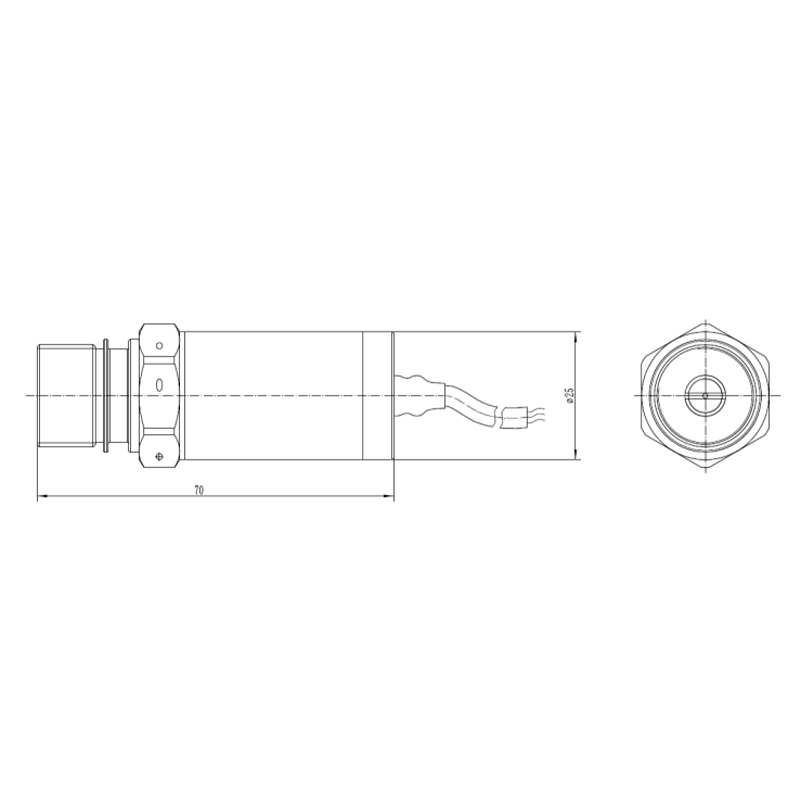
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 Датчик давления – Тип C
Датчик давления – Тип C -
 Комбинированная инерциальная навигационная система Чаочжи SiNS6230
Комбинированная инерциальная навигационная система Чаочжи SiNS6230 -
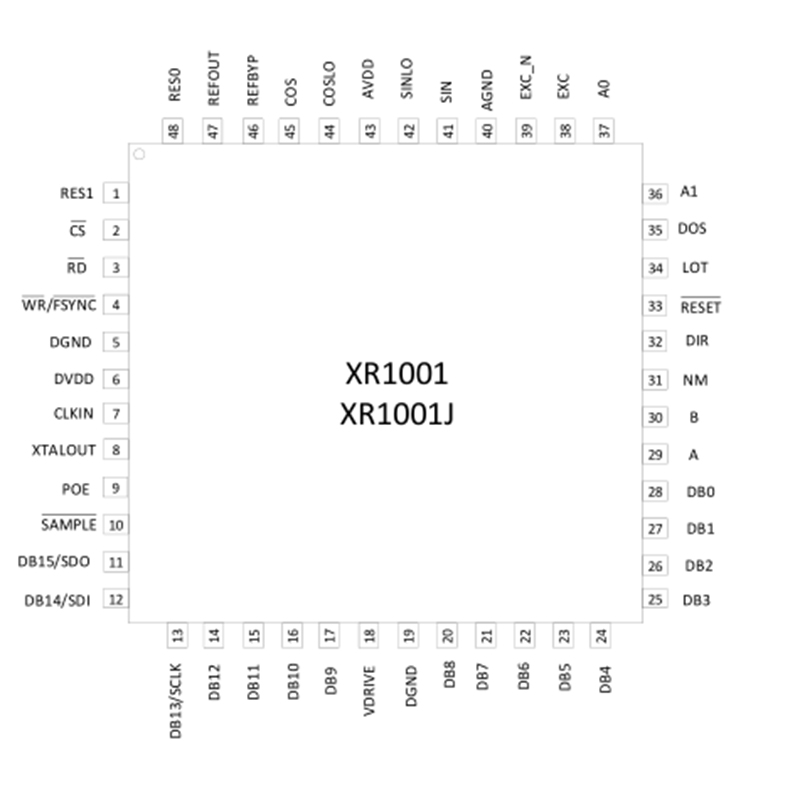 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 Оптический преобразователь с дисплейным управлением
Оптический преобразователь с дисплейным управлением -
 RSFK2492F009C1
RSFK2492F009C1 -
 CAMPS43B
CAMPS43B -
 Комбинированный датчик температуры и давления – Тип C
Комбинированный датчик температуры и давления – Тип C -
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B
Связанный поиск
Связанный поиск- Специализированный многопараметрический датчик (температура/давление/влажность)
- Многопараметрический кастомизированный высокоточный датчик производители
- Китай телеметрическая радиолиния связи производитель
- Малошумящий радиочастотный силовой транзистор
- Оптический преобразователь заводы
- Силовой транзистор индукционной плиты завод
- Силовой транзистор индукционной плиты заводы
- Китай датчик избыточного давления коммуналец производитель
- Комбинированный датчик температуры и давления для глубоководных исследований производитель
- Китай миниатюрный датчик температуры и давления для медицинского оборудования производитель

