
Инерциальный измерительный блок для автономного вождения
Автономное вождение – это сейчас на слуху, и часто в обсуждениях мелькает термин инерциальный измерительный блок (ИИБ). Но как часто мы задумываемся о реальных трудностях, связанных с его внедрением? По моему опыту, многие склонны видеть в этом просто 'черный ящик', который собирает данные и передает их компьютеру. А на самом деле, ИИБ – это сложная система, и ее эффективность напрямую влияет на безопасность и надежность беспилотного автомобиля. Хочу поделиться некоторыми моментами, которые мы обнаружили в процессе работы с различными решениями и некоторыми провальными попытками.
Что такое ИИБ на практике?
В идеале, инерциальный измерительный блок – это набор датчиков, таких как акселерометры, гироскопы и магнитометры, которые измеряют ускорение, угловую скорость и магнитное поле. На основе этих данных, с помощью сложных алгоритмов, ИИБ определяет положение, ориентацию и скорость перемещения транспортного средства. Да, это звучит просто, но на практике возникают нюансы. Возьмем, к примеру, наш проект для компании ООО Сиань Чэнань Измерение и Контроль Технологии. Мы поставляли им компоненты для разработки ИИБ для грузовых дронов, и они столкнулись с проблемой влияния вибраций от моторов на точность измерений. Это вызвало необходимость в применении сложных фильтров Калмана и алгоритмов компенсации вибраций. На самом деле, это лишь один из множества 'подводных камней'.
Одной из ключевых задач при выборе ИИБ является обеспечение его отказоустойчивости. Автономный автомобиль не может позволить себе сбоя в работе датчиков. Поэтому, мы уделяем особое внимание выбору производителей, которые предоставляют детальную документацию и предлагают услуги по кастомизации. Мы работали с несколькими поставщиками, и разница в качестве сервиса была огромной. Один из партнеров просто выдал нам готовый модуль, а при возникновении проблем предлагал только замену. С другим, наоборот, мы смогли договориться о совместной разработке решения, учитывающего специфические требования нашего проекта. Вот где действительно начинается профессиональный подход.
Проблемы с калибровкой и адаптацией
Калибровка инерциального измерительного блока – это критически важный этап, который часто недооценивают. Даже небольшие погрешности в калибровке могут привести к серьезным ошибкам в определении положения автомобиля. Особенно это актуально для автомобилей, которые будут эксплуатироваться в различных условиях – в городе, на трассе, в горах. Мы столкнулись с проблемой адаптации ИИБ к меняющимся магнитным полям. Например, вблизи металлических конструкций здания или моста магнитное поле может быть сильно искажено, что приводит к неточным измерениям. В таких случаях, необходимо использовать сложные алгоритмы компенсации магнитного поля или применять калибровочные процедуры, учитывающие местные особенности. Это добавляет сложности в процесс интеграции и требует значительных вычислительных ресурсов.
Не стоит забывать и о влиянии температуры на характеристики датчиков. Изменение температуры может приводить к дрейфу датчиков, что также влияет на точность измерений. Поэтому, необходимо использовать датчики с низким температурным дрейфом и предусмотреть систему компенсации температуры. Иногда, даже простая система обогрева датчиков может существенно улучшить производительность ИИБ в холодное время года. Мы один раз потратили немало времени на отладку ИИБ, который оказался неисправен из-за неправильного выбора температурного диапазона. В итоге, пришлось заменить датчики на более подходящие, что увеличило стоимость проекта и сроки его реализации.
Современные тенденции и перспективные разработки
В последнее время наблюдается тенденция к увеличению интегрированности инерциального измерительного блока. Вместо использования отдельных датчиков, производители все чаще предлагают интегрированные решения, которые объединяют несколько типов датчиков в одном модуле. Это позволяет снизить размеры и вес системы, а также повысить ее надежность. Кроме того, активно разрабатываются новые типы датчиков, такие как микромеханические системы (MEMS), которые отличаются высокой точностью и низким энергопотреблением. Эти разработки открывают новые возможности для создания более эффективных и надежных систем автономного вождения.
Также важным направлением является развитие алгоритмов обработки данных. Современные системы автономного вождения используют сложные алгоритмы, которые позволяют не только определять положение и ориентацию автомобиля, но и прогнозировать его будущее поведение. Эти алгоритмы основаны на машинном обучении и искусственном интеллекте, и постоянно совершенствуются. Например, в настоящее время разрабатываются алгоритмы, которые позволяют ИИБ адаптироваться к изменяющимся дорожным условиям и прогнозировать действия других участников движения. Это позволяет повысить безопасность и комфорт вождения.
Устойчивость к внешним воздействиям
Естественно, при создании ИИБ для автономного вождения важна его устойчивость к различным внешним воздействиям: вибрациям, электромагнитным помехам, перепадам температур, пыли и влаге. Компания ООО Сиань Чэнань Измерение и Контроль Технологии, например, часто запрашивают у нас компоненты, которые должны работать в экстремальных условиях. Это может быть, например, работа в пустыне с высокой температурой или на морском судне, где существует риск попадания влаги и соленого воздуха. Поэтому, мы уделяем особое внимание выбору материалов и конструктивных решений, которые обеспечивают высокую надежность и долговечность ИИБ. Часто это означает применение специальных покрытий, герметичных корпусов и других мер защиты.
В одной из наших попыток создать ИИБ для использования в авиации, мы столкнулись с проблемой электромагнитных помех от других электронных устройств. Мы использовали экранированные корпуса и специальные фильтры для подавления помех, но даже при этом возникали проблемы. В итоге, пришлось изменить конструкцию ИИБ и использовать более качественные материалы. Этот опыт научил нас тому, что нельзя недооценивать влияние внешних факторов на работу электронных устройств. Необходим комплексный подход, учитывающий все возможные источники помех и рисков.
Заключение
Таким образом, инерциальный измерительный блок – это сложная и многогранная система, требующая глубоких знаний и опыта. Внедрение ИИБ в автономные автомобили – это непростая задача, требующая решения множества технических и организационных проблем. Однако, несмотря на все сложности, разработки в этой области продолжают активно развиваться, и можно с уверенностью сказать, что в будущем мы увидим все более совершенные и надежные системы автономного вождения.
Важно понимать, что выбор ИИБ – это не просто выбор компонента, а выбор всей системы. Необходимо учитывать множество факторов, таких как требования к точности, надежности, стоимости и энергопотреблению. Кроме того, необходимо учитывать особенности эксплуатации автомобиля и условия окружающей среды. Только в этом случае можно создать ИИБ, который будет эффективно выполнять свою задачу и обеспечивать безопасность автономного вождения.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Датчик давления – Тип C
Датчик давления – Тип C -
 RSFK2492F009C1
RSFK2492F009C1 -
 CAMPS62
CAMPS62 -
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА -
 CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц
CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц -
 CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя
CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя -
 Радиочастотный силовой транзистор MRFE6VP100HR5
Радиочастотный силовой транзистор MRFE6VP100HR5 -
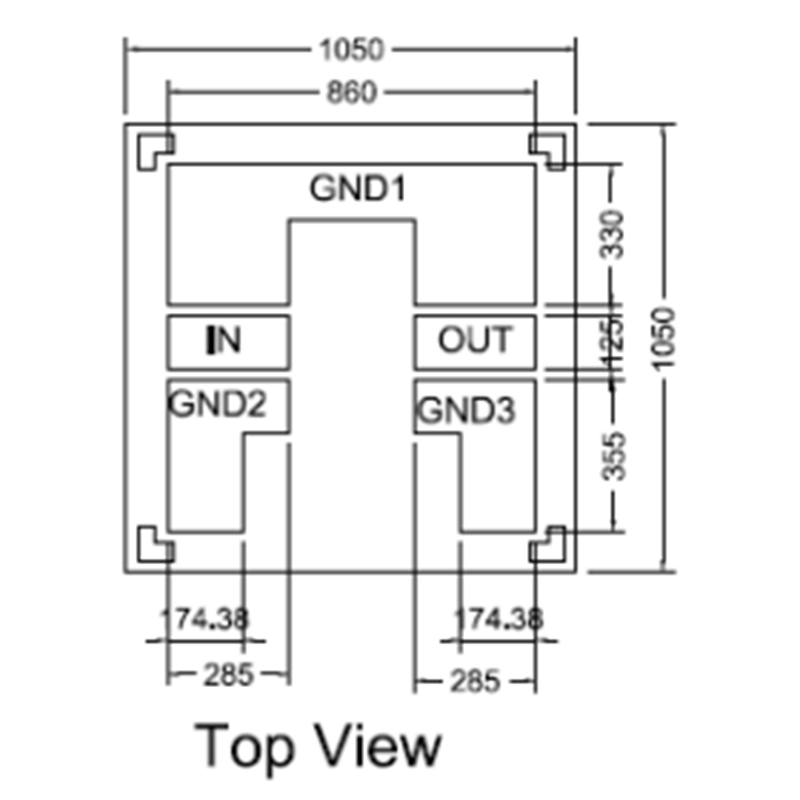
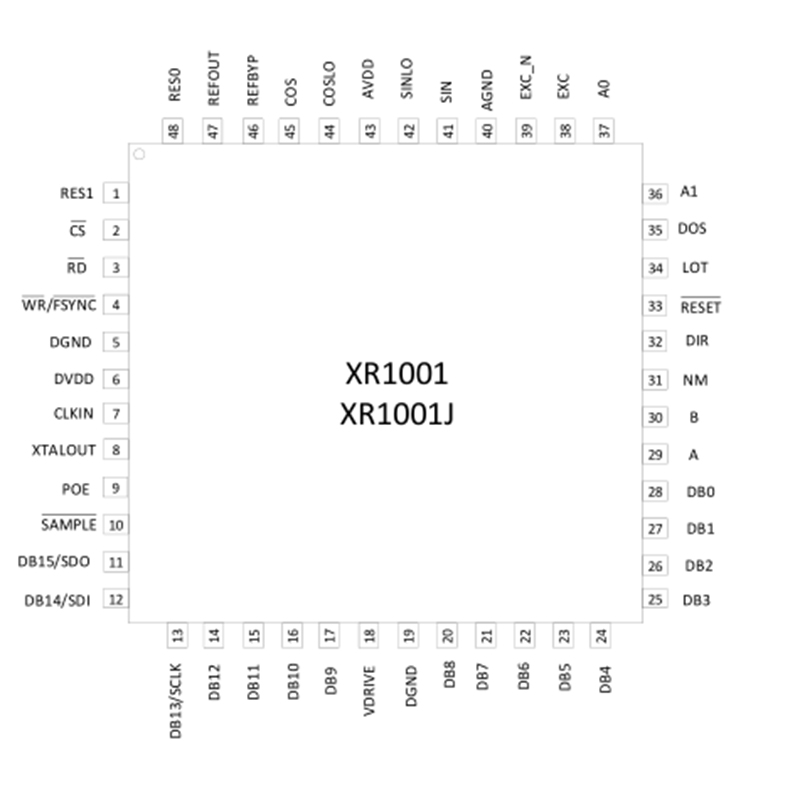 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 RSFK3670P019B1 FBAR-фильтр
RSFK3670P019B1 FBAR-фильтр -
 Радиочастотный силовой транзистор AFT31150NR5
Радиочастотный силовой транзистор AFT31150NR5 -
 Комбинированный датчик температуры и давления – Тип C
Комбинированный датчик температуры и давления – Тип C
Связанный поиск
Связанный поиск- Высококачественный оптический преобразователь
- Промышленный высокоточный датчик температуры и давления as20pt-500a заводы
- Контроллер
- Высокоточный датчик температуры и давления моторного отсека производитель
- Силовой транзистор индукционной плиты производители
- Модуль обработки сигналов с помехозащитой завод
- Комбинированный инерциальный измерительный блок чаочжи sins6230 заводы
- Интегрированный датчик температуры и давления для интернета вещей производители
- Датчик низкого давления для гидрологического мониторинга
- Гироскопический модуль с защитой от магнитных помех завод

