
Инерциальный измерительный блок для автономного вождения завод
Разработка и внедрение инерциального измерительного блока для автономного вождения завод – задача, которую часто недооценивают, фокусируясь исключительно на алгоритмах восприятия и планирования. Но ключевым звеном, определяющим точность и надежность всей системы, является именно эта аппаратная часть. Многие начинающие проекты изначально пытаются сэкономить на качестве ИБ для беспилотников, рассчитывая 'подтянуть' все остальное программно. Это, как правило, приводит к проблемам с стабильностью и предсказуемостью работы, особенно в сложных условиях. Сегодня хочу поделиться своими мыслями и опытом, полученным за последние годы работы с подобными системами. Не буду вдаваться в глубокую теоретическую базу, скорее расскажу о практических сложностях и потенциальных путях решения. И да, это не просто про датчики – это про интеграцию, калибровку, и, что немаловажно, надежность в реальных условиях эксплуатации.
Ключевые требования к ИБ для автономных систем
Первое, что нужно понимать, это не существует 'универсального' решения. Требования к ИБ для автономного вождения сильно зависят от предполагаемой области применения: от городской среды до автономных грузоперевозок по бездорожью. Но есть ряд общих принципов. Во-первых, это высокая точность и стабильность измерений – необходимо обеспечить минимальные погрешности в определении положения, ориентации и скорости. Во-вторых, это устойчивость к внешним помехам: электромагнитным, вибрациям, перепадам температур. В-третьих – надежность и долговечность, ведь от отказов в работе ИБ для беспилотников может зависеть безопасность людей. И, конечно, важен фактор стоимости, который часто диктует выбор конкретных компонентов и технологий.
Мы в ООО Сиань Чэнань Измерение и Контроль Технологии (ООО Сиань Чэнань Измерение и Контроль Технологии, https://www.xacamc.ru) регулярно сталкиваемся с этой проблемой. Наши клиенты часто обращаются с запросами на разработку и интеграцию ИБ для автономного вождения различной сложности. В первую очередь мы обращаем внимание на возможность калибровки системы 'in-situ' (в реальных условиях эксплуатации). Это позволяет компенсировать дрейф датчиков и обеспечить высокую точность измерений на протяжении всего срока службы.
Выбор оптимальной комбинации датчиков
Важный аспект – выбор комбинации датчиков. Обычно используется сочетание инерциальных измерительных блоков (IMU), глобальных систем позиционирования (GPS, GLONASS, Galileo), и лидаров или стереокамер для визуальной локализации. В некоторых случаях добавляют ультразвуковые датчики для работы в условиях плохой видимости. Выбор конкретного набора датчиков зависит от требуемой точности, стоимости и условий эксплуатации. Мы часто сталкиваемся с ситуацией, когда клиенты выбирают самые дешевые GPS-модули, не учитывая их ограниченную точность и подверженность помехам. Это приводит к необходимости использования дорогостоящих алгоритмов фильтрации и коррекции, что в конечном итоге увеличивает стоимость системы.
В нашей практике один из интересных кейсов связан с разработкой ИБ для беспилотных грузовиков, предназначенных для работы по грунтовым дорогам. Изначально рассматривались решения на основе только IMU и GPS. Однако, в ходе тестирования было выявлено, что точность позиционирования GPS значительно снижается в условиях плотной кроны деревьев и в горных районах. В итоге было принято решение добавить лидар для создания детальной карты местности и повышения точности локализации. Это позволило нам значительно улучшить характеристики ИБ для беспилотников и обеспечить безопасную работу грузовиков в сложных условиях.
Проблемы интеграции и калибровки
Даже если правильно выбраны датчики, их интеграция в единую систему и калибровка может оказаться непростой задачей. Инерциальные измерительные блоки склонны к дрейфу, то есть со временем погрешность измерений увеличивается. Для компенсации этого необходимо проводить регулярную калибровку, используя специальные алгоритмы и программное обеспечение. Мы используем как аппаратные, так и программные методы калибровки, в зависимости от требований к точности и бюджета проекта. Один из распространенных подходов – использование многомерного калибровочного стенда, который позволяет точно определить параметры дрейфа датчиков.
Важный аспект – синхронизация данных с различных датчиков. Необходимо обеспечить точное соответствие временных меток данных, поступающих от IMU, GPS и лидара. Несогласованность временных меток может привести к серьезным ошибкам в определении положения и ориентации. Для решения этой проблемы мы используем специализированные протоколы обмена данными и алгоритмы синхронизации.
Непредвиденные проблемы при работе с виброизоляцией
В процессе работы с различными конструкциями, часто возникает проблема с виброизоляцией. Датчики, особенно высокоточные IMU, чрезвычайно чувствительны к вибрациям. Недостаточная или неправильная виброизоляция может значительно ухудшить качество измерений, даже если сами датчики соответствуют высоким стандартам. В одном из проектов мы потратили немало времени на подбор оптимальной виброизоляционной системы, прежде чем добились стабильных результатов. Иногда, оказывается, что самое простое решение – это использование специальных демпфирующих материалов или изменение конструкции крепления датчиков.
Перспективы развития и новые технологии
Сейчас активно разрабатываются новые технологии, которые могут значительно улучшить характеристики ИБ для автономных систем. Это, в частности, использование нейронных сетей для компенсации дрейфа датчиков и улучшения точности локализации. Также перспективным направлением является разработка новых типов датчиков, например, на основе микрорезонаторов или MEMS-технологий. Эти датчики отличаются высокой точностью, компактностью и низким энергопотреблением.
Еще одним важным трендом является развитие роевых систем, в которых несколько автономных транспортных средств взаимодействуют друг с другом для решения общих задач. В таких системах необходимо обеспечить высокую точность позиционирования и ориентации каждого транспортного средства, а также надежную связь между ними. Для решения этих задач требуются передовые технологии ИБ для беспилотников и сложные алгоритмы координации движения.
Надеюсь, эта небольшая заметка дала вам представление о проблемах и вызовах, с которыми сталкиваются инженеры при создании и внедрении инерциального измерительного блока для автономного вождения завод. Это сложная, но очень интересная и перспективная область, которая будет играть все более важную роль в будущем транспортной системы.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль -
 Оптический преобразователь с дисплейным управлением
Оптический преобразователь с дисплейным управлением -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 Датчик давления – Тип D
Датчик давления – Тип D -
 Трехосный гироскопический модуль Чаочжи SiGM9030R
Трехосный гироскопический модуль Чаочжи SiGM9030R -
 CAMPS62
CAMPS62 -
 Комбинированная инерциальная навигационная система Чаочжи SiNS6230
Комбинированная инерциальная навигационная система Чаочжи SiNS6230 -
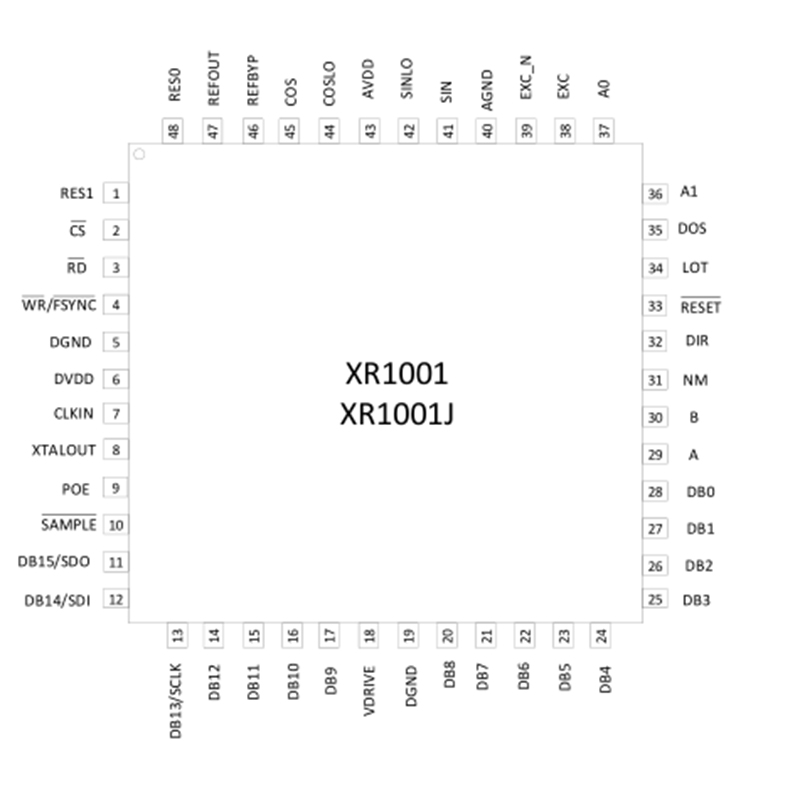 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
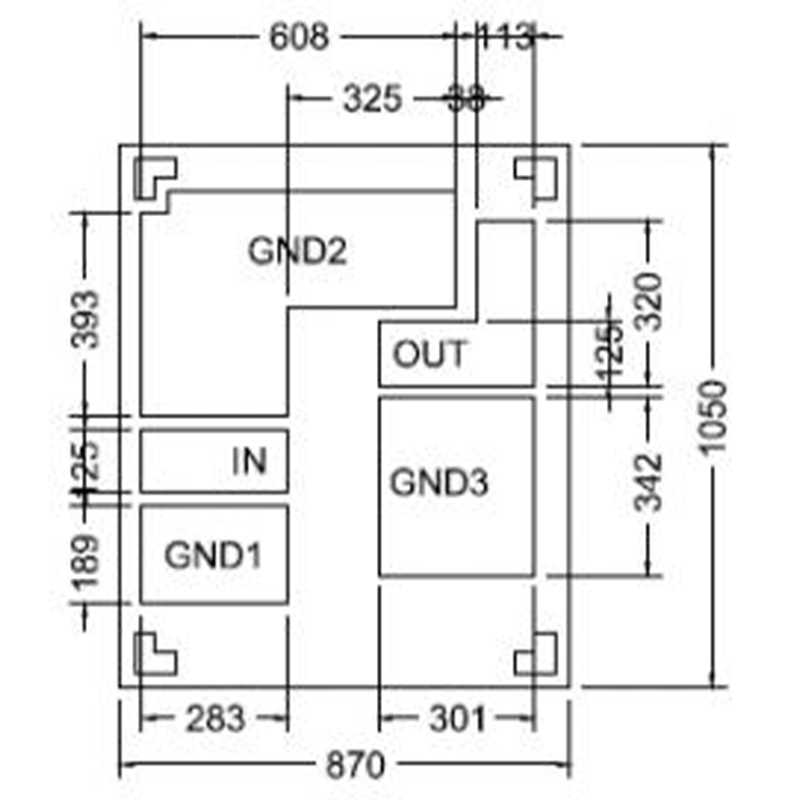 RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр -
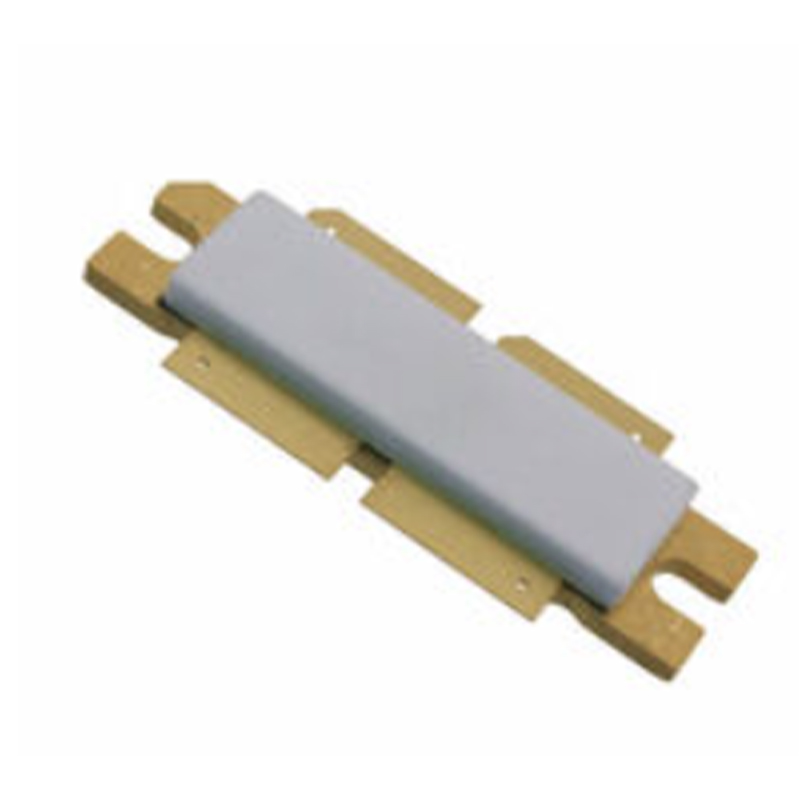 Радиочастотный силовой транзистор MRF8P29300HR6
Радиочастотный силовой транзистор MRF8P29300HR6 -
 CAMPS46/56
CAMPS46/56 -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A
Связанный поиск
Связанный поиск- Специализированный многопараметрический датчик (температура/давление/влажность) производители
- Оптический преобразователь-приемопередатчик производители
- Комбинированный оптический преобразователь 20-ти канальный
- Взрывозащищенный высокоточный датчик температуры и давления as20pt-500b заводы
- Китай модуль сбора и воспроизведения рч-сигналов производитель
- Комбинированный оптический преобразователь
- Монолитные fbar фильтры rsfk1618f016b1
- Rsfk2492f009c1 заводы
- Высокоточный комбинированный инерциальный навигационный модуль
- Платформа коммуникационного модуля завод

