
Инерциальный измерительный блок для автономного вождения заводы
На рынке автономного вождения сейчас много шума. Все говорят о сенсорах, алгоритмах и мощных вычислительных системах. Но часто забывают о фундаментальной задаче – точной и надежной информации об окружающей среде. И здесь на первый план выходит инерциальный измерительный блок для автономного вождения заводы. Изначально я относился к этому как к относительно простой задаче, просто как к еще одному компоненту системы. Однако, опыт показывает, что от качества этого блока напрямую зависят безопасность и эффективность полностью автономных транспортных средств. Нужно понимать, что просто купить готовый блок недостаточно – нужно глубокое понимание его возможностей и ограничений, а также умение правильно интегрировать его с другими системами.
Проблема локализации и навигации: за пределами GPS
GPS, конечно, незаменим в большинстве случаев, но его точность недостаточна для автономного вождения, особенно в городских условиях с высотными зданиями. И здесь в игру вступает инерциальная навигация. Но это не просто суммирование ошибок – это постоянная борьба с дрейфом, с погрешностями датчиков, с влиянием внешних факторов (вибрации, температурные изменения). Первые проекты, над которыми мы работали, столкнулись с серьезными проблемами точности позиционирования на коротких дистанциях, особенно в условиях плохой видимости. Параметры дрейфа даже при оптимальных условиях сильно отличались от заявленных производителем, что создавало серьезные трудности при выполнении маневров.
Я помню один конкретный случай с одним из наших заказчиков – производителем беспилотных грузовиков. Они планировали использовать наши инерциальные измерительные блоки для долгосрочного мониторинга маршрута и оптимизации маршрутов в зависимости от дорожной обстановки. При испытаниях в реальных условиях, точность навигации была ниже требуемой. Пришлось проводить тщательную калибровку и коррекцию данных, но даже это не дало желаемого результата. Выяснилось, что проблема не только в самом блоке, но и в алгоритмах фильтрации и интеграции инерциальных данных с данными других сенсоров – лидара и камеры. Это была настоящая командная работа, которая потребовала значительных усилий и времени.
Калибровка и компенсация дрейфа: тонкости и особенности
Калибровка инерциального измерительного блока – это не просто рутинная процедура. Это очень деликатный процесс, который требует специального оборудования и квалифицированного персонала. Мы используем системы, позволяющие точно определить углы наклона и поворота блока в различных плоскостях. Кроме того, необходимо учитывать влияние температурных изменений на параметры датчиков. Погрешность из-за температурного дрейфа может быть весьма существенной, особенно в условиях резких перепадов температур.
В последнее время наблюдается тенденция к использованию самокалибрующихся блоков. Они автоматически корректируют параметры датчиков в процессе эксплуатации, что позволяет поддерживать высокую точность навигации. Но и в этом случае важно проводить регулярную проверку и калибровку, чтобы убедиться в работоспособности системы.
Интеграция с другими сенсорами: синергия и вызовы
Как я уже говорил, инерциальный измерительный блок не работает в вакууме. Его точность значительно повышается при интеграции с другими сенсорами, такими как лидар, камера и ультразвуковые датчики. Например, данные лидара позволяют компенсировать погрешности инерциальной навигации, а данные камеры – идентифицировать ориентиры и улучшить точность позиционирования.
Но интеграция с другими сенсорами – это сложная задача, которая требует разработки специальных алгоритмов и программного обеспечения. Необходимо учитывать особенности каждого сенсора, их погрешности и влияние внешних факторов. Также важно обеспечить синхронизацию данных от всех сенсоров, чтобы избежать рассогласования и потери точности.
Современные тенденции и перспективы развития
Сейчас активно разрабатываются новые поколения инерциальных измерительных блоков с использованием твердотельных датчиков и более совершенных алгоритмов обработки данных. Эти блоки обладают более высокой точностью, надежностью и устойчивостью к внешним воздействиям. Кроме того, наблюдается тенденция к уменьшению размеров и веса блоков, что позволяет интегрировать их в компактные транспортные средства.
Особое внимание уделяется разработке алгоритмов машинного обучения для компенсации погрешностей инерциальной навигации. Эти алгоритмы позволяют адаптироваться к изменяющимся условиям эксплуатации и повышать точность позиционирования в реальном времени. Мы сейчас активно тестируем такие решения, и результаты показывают многообещающие перспективы.
Примеры успешно реализованных проектов
Помимо грузовиков, наши инерциальные измерительные блоки используются в беспилотных автобусах, дронах и роботах. В частности, один из наших клиентов – компания 'Автодор', использует наши блоки для управления беспилотными шаттлами в рамках пилотного проекта по организации автономного транспорта в аэропортах.
В будущем, я думаю, что инерциальные измерительные блоки станут еще более важным компонентом систем автономного вождения. Они будут использоваться для обеспечения безопасной и надежной навигации в любых условиях, даже в условиях отсутствия GPS-сигнала. И, конечно, дальнейшее развитие алгоритмов машинного обучения позволит значительно повысить точность и устойчивость этих блоков.
ООО Сиань Чэнань Измерение и Контроль Технологии постоянно работает над совершенствованием своих инерциальных измерительных блоков и предлагает комплексные решения для автономного вождения. Более подробную информацию можно найти на нашем сайте: https://www.xacamc.ru.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный -
 Радиочастотный силовой транзистор MRFE6VP100HR5
Радиочастотный силовой транзистор MRFE6VP100HR5 -
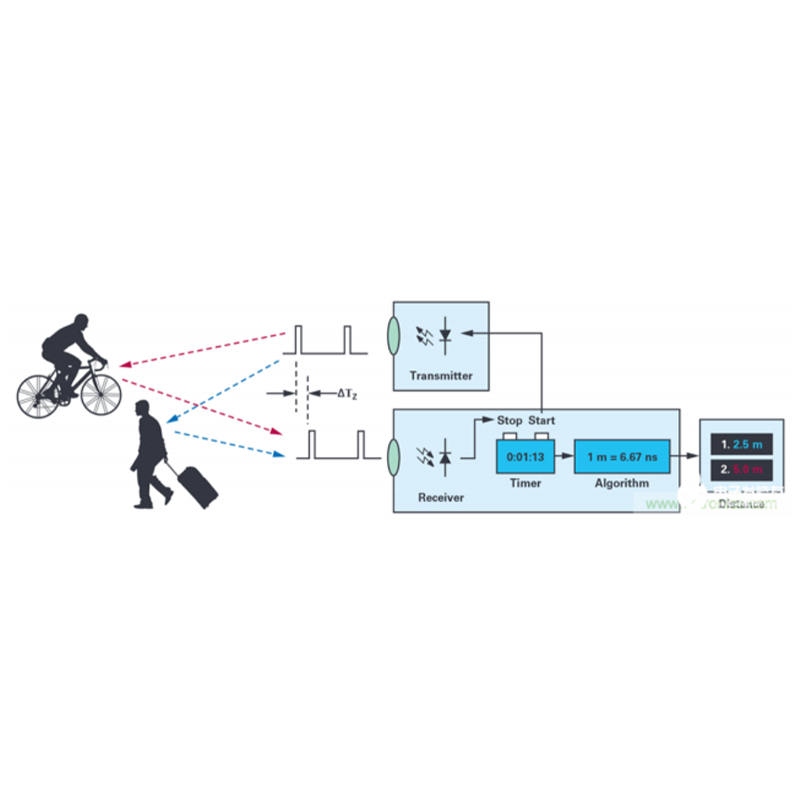 CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров
CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров -
 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
 CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц
CAXR8314 – Детектор/контроллер RF 0.05-4 ГГц -
 Модуль сбора и воспроизведения данных
Модуль сбора и воспроизведения данных -
 Датчик давления – Тип D
Датчик давления – Тип D -
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль -
 Трехосный гироскопический модуль Чаочжи SiGM9030R
Трехосный гироскопический модуль Чаочжи SiGM9030R -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА -
 Модуль передачи данных
Модуль передачи данных
Связанный поиск
Связанный поиск- Автомобильный силовой транзистор завод
- Датчик избыточного давления 2 5 мпа производители
- Датчики по индивидуальным требованиям
- Трехосный гироскопический модуль чаочжи sigm9030r заводы
- Комплексный тестер бпла производитель
- Специализированный датчик давления для ядерной промышленности производители
- Модуль передачи данных производитель
- Высокоточный комбинированный инерциальный навигационный модуль
- Автомобильный комбинированный датчик температуры и давления производители
- As20pt-500c высокоточный датчик температуры и давления

