
Микромеханический гиромодуль
Микромеханические гиромодули стали неотъемлемой частью современной электроники – от дронов и робототехники до автомобильной системы стабилизации. Но часто, при обсуждении этих устройств, возникает ощущение, что все просто и понятно. На деле, проектирование и применение гироскопов, особенно в компактном варианте, сопряжено с целым рядом проблем и требует глубокого понимания как механики, так и электроники. Эта статья – попытка поделиться опытом, полученным за несколько лет работы с подобными модулями, осветить не только очевидные аспекты, но и те, которые часто упускаются из виду, особенно в контексте реальных задач.
Что такое микромеханический гиромодуль и зачем он нужен?
По сути, микромеханический гиромодуль – это миниатюрный гироскоп, включающий в себя чувствительный элемент (обычно на основе волоконной оптики или MEMS), систему усиления сигнала и процессор для обработки данных. Основная задача – измерение угловой скорости вращения. Их используют для ориентации, стабилизации, определения наклона, отслеживания движения и выполнения множества других функций. Разные типы гироскопов имеют разные характеристики: диапазон угловых скоростей, точность, стабильность, размер, энергопотребление. Выбор конкретного модуля всегда зависит от конкретной задачи и требуемых параметров.
Одна из распространенных ошибок – упрощенное представление о том, что для простого отслеживания ориентации достаточно недорогого гироскопа. На практике, даже небольшие ошибки в показаниях могут приводить к серьезным последствиям, особенно в критически важных приложениях, таких как управление полетом дрона или навигация в беспилотных системах. Поэтому выбор гироскопа – это не просто вопрос цены, а вопрос надежности и производительности.
MEMS гироскопы: преимущества и недостатки
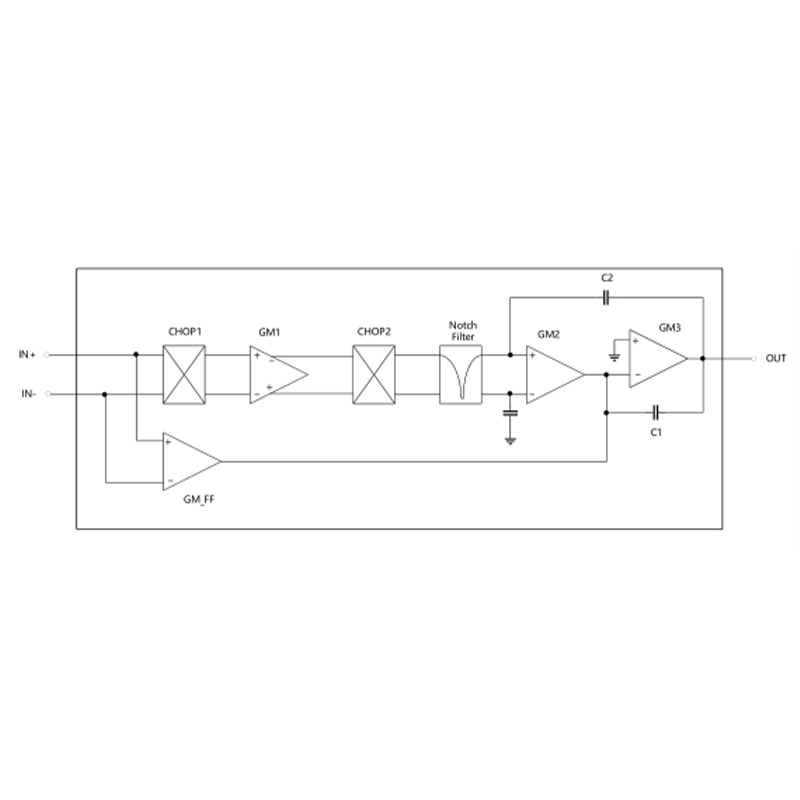
Наиболее распространенным типом современных гироскопов являются MEMS (Micro-Electro-Mechanical Systems) устройства. Они обладают компактностью, низкой стоимостью и хорошей энергоэффективностью. Но у них есть и свои недостатки. MEMS гироскопы более подвержены влиянию вибраций, температурных изменений и электромагнитных помех, чем, например, волоконно-оптические гироскопы. Это требует использования дополнительных методов фильтрации и компенсации ошибок.
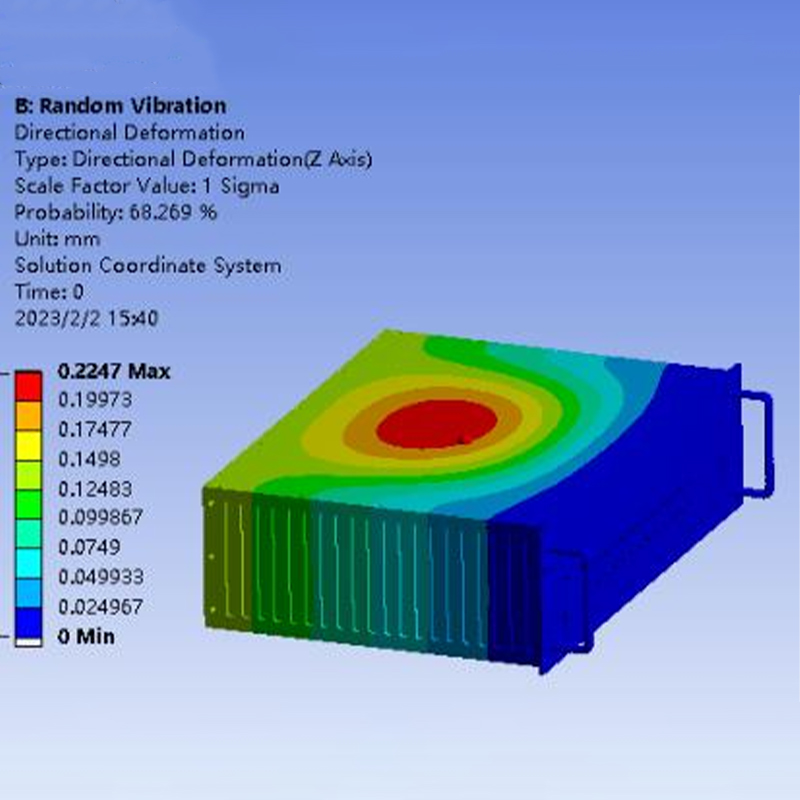
Мы сталкивались с проблемой сильной дрейфа показаний у некоторых MEMS модулей в условиях повышенной вибрации. Решение – использование специализированных алгоритмов компенсации дрейфа и более качественной механической изоляции. При этом важно учитывать, что такие решения всегда имеют свою цену – увеличение сложности программного обеспечения и, возможно, необходимость в более дорогостоящих компонентах.
Практические аспекты использования микромеханических гиромодулей
При интеграции гироскопа в систему возникает множество вопросов. Например, как правильно его подключить к микроконтроллеру или встраиваемому компьютеру? Как настроить параметры фильтрации? Как обеспечить стабильность работы в условиях помех? Вопрос питания также важен. Некоторые гироскопы требуют стабилизированного напряжения питания, другие могут работать от батарей.
В одном из наших проектов мы использовали гироскоп на основе волоконной оптики для управления ориентацией небольшой солнечной панели. Проблема заключалась в том, что система работала в условиях интенсивного солнечного света, который создавал значительные электромагнитные помехи. Для решения этой проблемы мы использовали экранирование и фильтрацию сигнала, а также разработали алгоритм, который учитывал влияние помех на показания гироскопа. Это был сложный процесс, потребовавший значительных усилий и времени, но в итоге мы добились стабильной работы системы.
Связь с другими датчиками: IMU и ее преимущества
Часто гироскопы используются в составе инерциальных измерительных блоков (IMU), которые объединяют гироскопы, акселерометры и магнитометры. Такая комбинация позволяет получить более полную информацию о движении и ориентации объекта. Использование IMU значительно повышает точность и надежность системы, особенно в сложных условиях. Наша компания, ООО Сиань Чэнань Измерение и Контроль Технологии, предлагает широкий спектр IMU, устойчивых к экстремальным условиям эксплуатации. Наш опыт показывает, что интеграция данных с разных датчиков требует разработки специальных алгоритмов фильтрации и калибровки.
Особенно важно обратить внимание на правильную калибровку IMU. Неправильная калибровка может привести к значительным ошибкам в показаниях. Мы используем как стандартные алгоритмы калибровки, так и разрабатываем собственные, учитывающие специфику конкретного приложения. Иногда, для достижения максимальной точности, необходимо проводить калибровку в реальных условиях эксплуатации.
Перспективы развития микромеханических гиромодулей
Технологии микромеханических гиромодулей постоянно развиваются. Появляются новые материалы, новые конструкции, новые алгоритмы обработки сигналов. Одной из перспективных направлений является разработка гироскопов на основе волоконной оптики, которые обладают более высокой точностью и стабильностью, чем MEMS гироскопы. Еще одно направление – создание гироскопов с интегрированной электроникой, которые позволяют уменьшить размер и энергопотребление системы.
Мы активно следим за развитием этих технологий и постоянно внедряем новые решения в наши проекты. В настоящее время мы работаем над разработкой гироскопа нового поколения, который будет обладать повышенной устойчивостью к вибрациям и температурным изменениям. Мы уверены, что микромеханические гиромодули будут играть все более важную роль в современной электронике, обеспечивая работу множества новых и интересных устройств.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 CAMPS62
CAMPS62 -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
 Датчик давления – Тип B
Датчик давления – Тип B -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА -
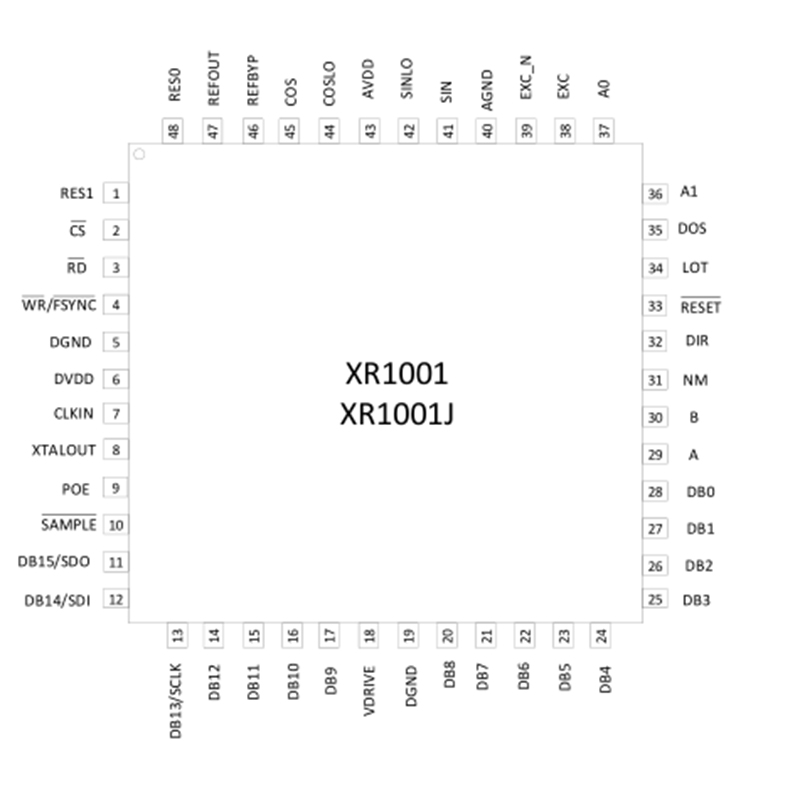 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
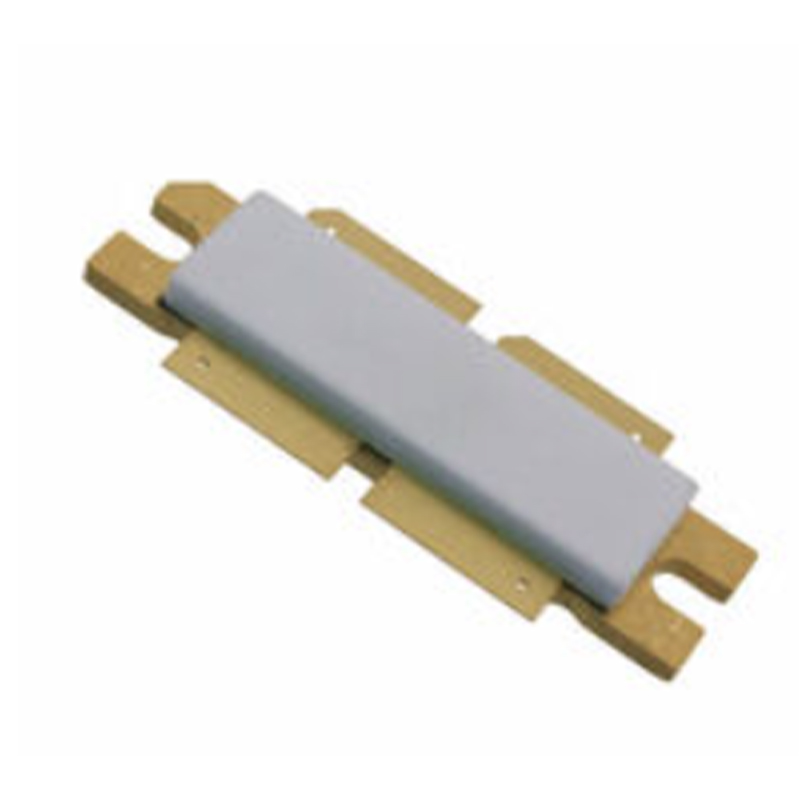 Радиочастотный силовой транзистор MRF8P29300HR6
Радиочастотный силовой транзистор MRF8P29300HR6 -
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль -
 Датчик давления – Тип C
Датчик давления – Тип C -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
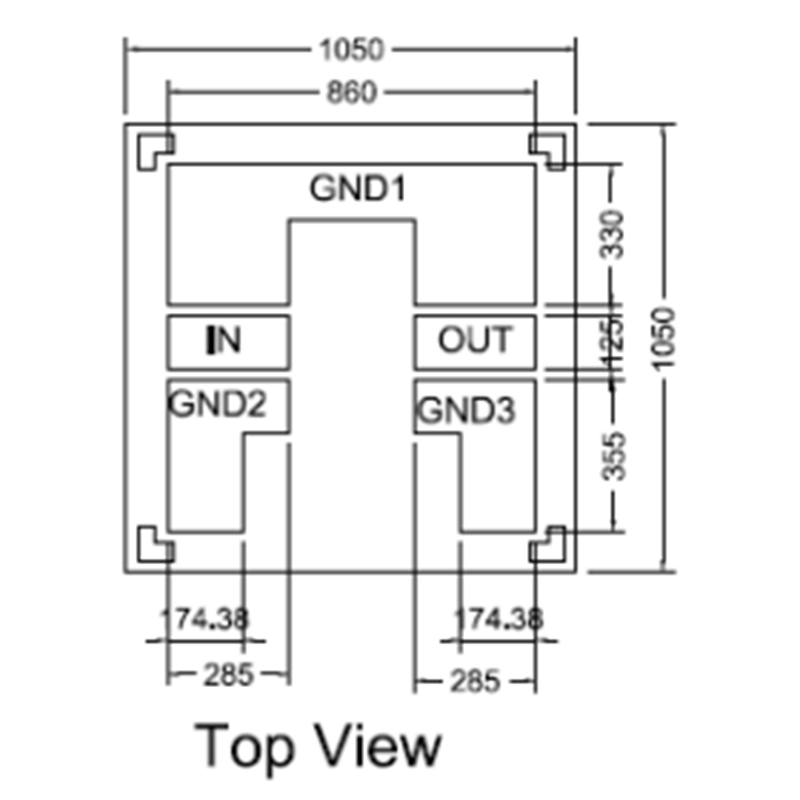 RSFK3670P019B1 FBAR-фильтр
RSFK3670P019B1 FBAR-фильтр -
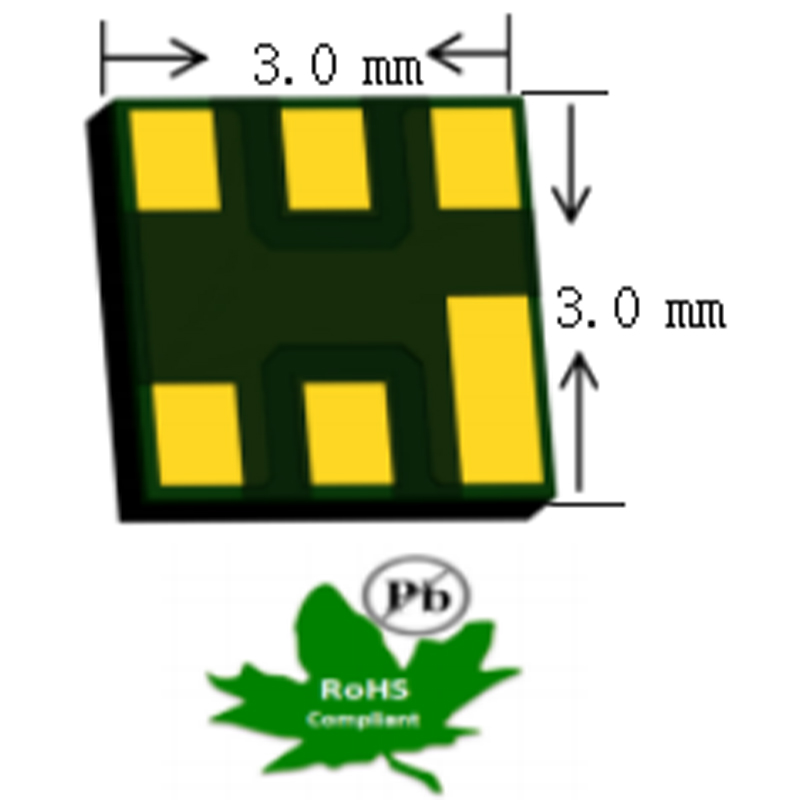 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный
Связанный поиск
Связанный поиск- Подводный инерциальный измерительный модуль производитель
- Трехосный гироскопический модуль чаочжи sigm9030r производитель
- As20pt-500c высокоточный датчик температуры и давления
- Модуль обработки сигналов с помехозащитой
- Высокоточный датчик высокого давления as20h-350 производители
- Caxr1001 - цифровой преобразователь резольвера с разрешением 10-16 бит завод
- Силовые транзисторы для инвертора завод
- Инерциальный измерительный модуль с низким уровнем шумов завод
- Caxr8314 – детектор/контроллер rf 0.05-4 ггц производитель
- Китай специализированный беспроводной самоорганизующийся датчик давления производитель

