
Подводный инерциальный измерительный модуль
Подводный инерциальный измерительный модуль (ИИМ) – это, казалось бы, простая штука. Полагаешь, что поставил – и все работает. Но опыт показывает, что это далеко не так. Многие начинающие проекты терпят крах именно из-за недооценки сложности интеграции и калибровки таких систем в реальные подводные условия. Сегодня хочу поделиться не каким-то идеальным 'рецептом', а скорее, набором наблюдений и ошибок, которые мы совершили в ООО Сиань Чэнань Измерение и Контроль Технологии (https://www.xacamc.ru) за последние годы работы с этими устройствами.
Введение: что такое ИИМ и зачем он нужен?
Итак, для начала – напоминание, что такое ИИМ. Это, в сущности, комплекс датчиков и вычислительных устройств, предназначенных для определения положения, скорости и ориентации объекта в пространстве без использования внешних сигналов, таких как GPS. В подводных условиях это критически важно, так как GPS-сигналы не проникают сквозь толщу воды. Поэтому ИИМ активно используется в автономных подводных аппаратах (AUV), дистанционно управляемых подводных аппаратах (ROV), а также в различных гидроакустических системах.
Зачем он нужен? Во-первых, для навигации. АВУ и РОВем нужно знать, где они находятся и куда двигаться. Во-вторых, для стабилизации. Например, при выполнении точных измерений или манипуляциях с объектами на дне. В-третьих, для создания карт дна и других подводных структур. Конечно, есть и другие применения, но эти три – наиболее распространенные.
Основные компоненты и принципы работы
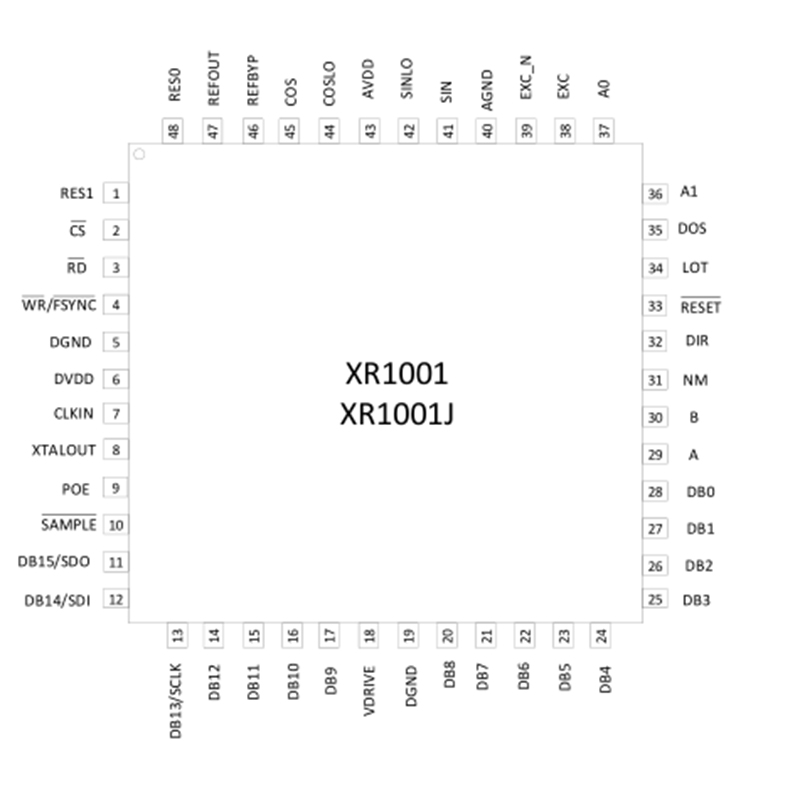
В основе ИИМ лежит принцип инерциальной навигации. Он основан на измерении ускорения и угловой скорости объекта. Эти данные затем интегрируются для вычисления положения и ориентации. В типичный ИИМ входят акселерометры, гироскопы и магнитометры (хотя в подводных системах магнитометры обычно исключаются из-за влияния магнитных аномалий дна).
Ключевой момент – это правильная калибровка датчиков. Влияние температуры, давления и других факторов на характеристики датчиков необходимо учитывать и компенсировать. Это часто самая сложная часть работы с ИИМ. Мы, например, долго бились с гироскопами, которые давали значительные погрешности из-за температурных дрейфов. Только разработав специальный алгоритм компенсации, удалось добиться приемлемой точности.
Калибровка в условиях эксплуатации: вызов для инженеров
Калибровка – это не разовое мероприятие. При эксплуатации ИИМ подвергается воздействию различных факторов, которые могут повлиять на точность измерений. Поэтому калибровку необходимо проводить регулярно, а в идеале – в процессе эксплуатации. Однако это не всегда возможно. Например, при работе в удаленных районах или при использовании аппарата, который часто погружается и всплывает.
Мы в нашей компании разработали систему автоматической калибровки, которая позволяет проводить ее прямо на борту АВУ. Это значительно упрощает процесс и позволяет поддерживать высокую точность измерений в течение всего срока службы устройства. Конечно, это требует значительных инвестиций в разработку и внедрение, но, на наш взгляд, это оправдано.
Проблемы и трудности при использовании ИИМ под водой
Использование ИИМ под водой сопряжено с рядом трудностей. Во-первых, это влияние давления на датчики. Давление может привести к деформации корпуса датчиков и изменению их характеристик. Поэтому ИИМ должен быть герметичным и рассчитанным на большие глубины.
Во-вторых, это влияние воды на электромагнитные сигналы. Вода поглощает электромагнитные сигналы, что может привести к затуханию сигналов от датчиков и снижению точности измерений. Поэтому необходимо использовать специальные экранированные кабели и датчики, устойчивые к воздействию воды.
В-третьих, это влияние течений и других внешних факторов. Течения могут смещать АВУ и привести к погрешностям в навигации. Поэтому необходимо использовать системы компенсации течений или использовать дополнительные датчики, такие как доплеровские гидроакустические датчики.
Сложности с интеграцией в существующие системы управления
Просто взять готовый ИИМ и 'подключить' его к существующей системе управления – это не всегда возможно. Часто требуется разработка специализированного программного обеспечения для обработки данных от датчиков и интеграции их с другими системами.
Мы сталкивались с ситуацией, когда заказчик хотел использовать ИИМ с существующей системой управления ROV, которая была разработана еще в 90-х годах. Системы управления были абсолютно несовместимы, и потребовалась полная переработка программного обеспечения. Это добавило значительных затрат и времени в проект.
Примеры успешных и неудачных проектов
Наш опыт работы с ИИМ включает в себя как успешные, так и неудачные проекты. Например, мы участвовали в проекте по картографированию дна в районе Сулавеси. Мы использовали ИИМ для навигации АВУ и получения точных данных о глубине и рельефе дна. Результаты проекта были очень успешными, и мы получили много положительных отзывов от заказчика.
Но были и неудачные проекты. Например, мы участвовали в проекте по поиску затонувших кораблей. Мы использовали ИИМ для навигации РОВа и поиска корабля. Однако, из-за плохого качества данных, полученных от датчиков, мы не смогли найти корабль. Пришлось использовать другие методы поиска, что увеличило затраты и время проекта.
Что можно улучшить в современных решениях?
На мой взгляд, в современных решениях по разработке ИИМ есть над чем поработать. Во-первых, это упрощение процесса калибровки. Необходимо разработать более автоматизированные и удобные инструменты калибровки, которые позволят проводить ее без специального оборудования и знаний.
Во-вторых, это повышение точности датчиков. Необходимо разрабатывать новые датчики, которые будут более устойчивы к воздействию внешних факторов и давать более точные измерения.
В-третьих, это улучшение программного обеспечения. Необходимо разрабатывать более мощные и гибкие алгоритмы обработки данных, которые позволят извлекать максимальную информацию из данных, полученных от датчиков.
Заключение: перспективы развития и рекомендации
Подводный инерциальный измерительный модуль – это перспективное направление развития подводной робототехники. С развитием технологий и появлением новых датчиков, точность и надежность ИИМ будет только расти. Однако, необходимо учитывать все трудности и проблемы, связанные с использованием ИИМ под водой.
Мои рекомендации: тщательно выбирайте ИИМ для конкретной задачи, проводите тщательную калибровку, используйте системы компенсации течений и других внешних факторов, и, конечно же, не забывайте о резервных системах навигации. И помните, что даже самая совершенная система не сможет работать без грамотного персонала, который будет ее эксплуатировать и обслуживать.
ООО Сиань Чэнань Измерение и Контроль Технологии (https://www.xacamc.ru) продолжает активно работать в области разработки и поставки ИИМ и сопутствующего оборудования. Мы стремимся предоставлять нашим клиентам наиболее современные и эффективные решения для подводной навигации и картографирования. Мы работаем с различными типами ИИМ, от малогабаритных модулей для небольших ROV до высокоточных систем для глубоководных исследований. При необходимости, предлагаем индивидуальные решения, разработанные с учетом конкретных требований заказчика.Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
 Радиочастотный силовой транзистор MRFE6VP100HR5
Радиочастотный силовой транзистор MRFE6VP100HR5 -
 Трехосный гироскопический модуль Чаочжи SiGM9030R
Трехосный гироскопический модуль Чаочжи SiGM9030R -
 CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя
CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя -
 CAMPS62
CAMPS62 -
 CAMPS46/56
CAMPS46/56 -
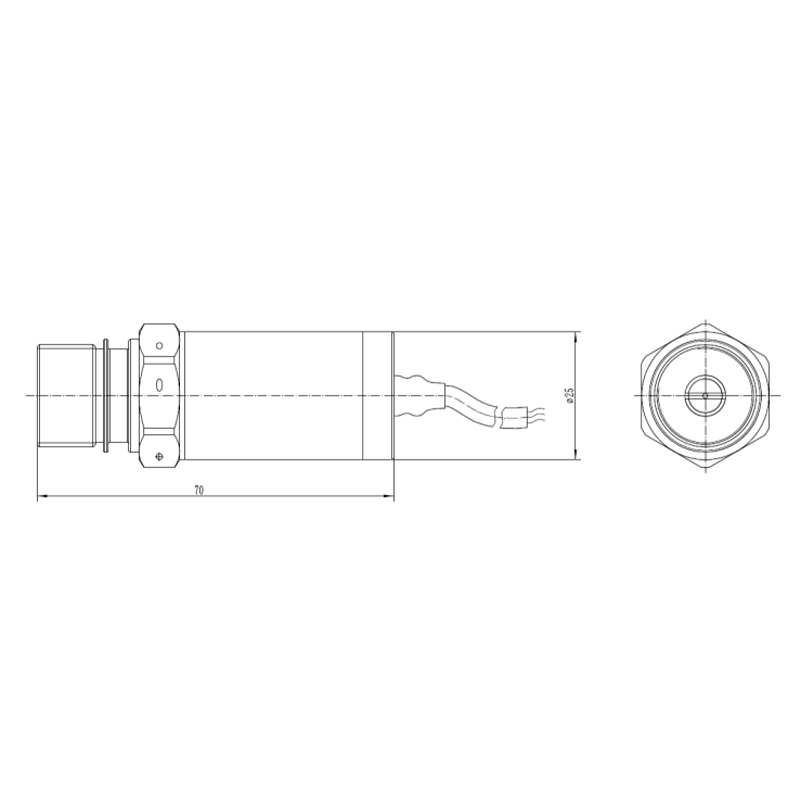
 Датчик давления – Тип C
Датчик давления – Тип C -
 Датчик давления – Тип B
Датчик давления – Тип B -
 Датчик давления – Тип D
Датчик давления – Тип D -
 RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр -
 Чаочжи SiMU9030S инерциальный измерительный модуль
Чаочжи SiMU9030S инерциальный измерительный модуль -
 Датчик давления – Тип A
Датчик давления – Тип A
Связанный поиск
Связанный поиск- Трехосный гироскопический модуль чаочжи sigm9030r
- Промышленный комбинированный датчик температуры и давления завод
- Китай радиочастотные фильтрующие микросхемы производитель
- Китай интегрированный датчик температуры и давления с широким диапазоном измерений производитель
- Китай широкодиапазонный комбинированный датчик давления и температуры производитель
- Контроллер
- Китай специализированный датчик давления для высокорадиационных сред производитель
- Низкопотребляющий комбинированный датчик температуры и давления заводы
- Радиочастотный силовой транзистор mrfe6vp100hr5 производитель
- Цифро-аналоговый преобразователь sigma-delta завод

