
Подводный инерциальный измерительный модуль завод
За последние годы наблюдается растущий интерес к автономным подводным аппаратам и системам мониторинга океана. В центре этой тенденции - подводные инерциальные измерительные модули (ПИМ). Очевидно, что спрос на них будет только расти. Но часто встречается упрощенное представление: 'купил ПИМ – и все готово для автономной навигации'. Это, мягко говоря, не так. Реальность оказывается гораздо сложнее, с множеством нюансов, связанных с разработкой, испытаниями и, конечно, производством. Постараюсь поделиться своим опытом, от неудачных попыток до относительно успешных проектов, и обозначить ключевые проблемные зоны на современном заводе, занимающемся производством таких модулей. Не обещаю универсальных решений, но надеюсь, что мои наблюдения могут быть полезны.
Обзор: что скрывается за красивой цифрой
Дело не только в чипе, который измеряет ускорение и угловую скорость. Речь идет о всей системе: высокоточных датчиках, сложной электронике, специальном программном обеспечении для фильтрации и интеграции данных, а также квалифицированных кадрах для производства и обслуживания. И все это должно работать в крайне агрессивных условиях – давление, температура, соленость. Мы в ООО 'Сиань Чэнань Измерение и Контроль Технологии' (https://www.xacamc.ru/) занимаемся поставками электронного оборудования и комплектующих для таких систем, и за время работы (с 2011 года) накопили немалый опыт. Ключевой вопрос – соответствие заявленным характеристикам в реальных условиях. Часто оказывается, что 'на бумаге' все прекрасно, а в воде – появляются неожиданные погрешности и дрейф.
Основные проблемы производства и контроля качества
Первая проблема, с которой сталкиваешься – это выбор компонентов. Не все компоненты, подходящие для наземных систем, выдерживают подводные условия. Например, электроника должна быть защищена от коррозии, а датчики – от механических повреждений. Мы часто встречались с ситуациями, когда датчики, изначально рассчитанные на определенный диапазон рабочих температур, переставали давать точные данные при погружении на большую глубину. Это связано с изменением теплового режима и, как следствие, с деградацией материалов.
Контроль качества – это отдельная большая тема. Простое тестирование на стенде недостаточно. Необходимы испытания в имитирующих подводных условиях – в гидростатических камерах, в камерах с переменной температурой и соленостью воды. Нельзя недооценивать влияние вибраций и акустических волн, которые также могут влиять на точность измерений. Мы разработали собственную методику испытаний, которая включает в себя не только количественную оценку погрешностей, но и качественный анализ данных, позволяющий выявить скрытые проблемы. Но даже с такой методикой иногда приходится сталкиваться с неожиданными дефектами, которые проявляются только после длительной эксплуатации.
Завод, производящий подводные инерциальные измерительные модули, должен иметь полный цикл контроля, включающий проверку каждой партии компонентов, функциональное тестирование готовых модулей и испытания на соответствие требованиям заказчика. При этом необходимо учитывать не только технические характеристики, но и соответствие стандартам безопасности и экологическим нормам. Это требует значительных инвестиций в оборудование и обучение персонала.
Интеграция с другими системами: мост между датчиками и автономностью
Иметь точный ПИМ – это только половина дела. Важно правильно интегрировать его с другими компонентами автономной системы – с системами управления, навигации, коммуникации. И здесь тоже возникают трудности. Необходимо учитывать взаимодействие датчиков, особенности работы программного обеспечения, а также требования к энергопотреблению. Особенно сложной задачей является синхронизация данных от разных датчиков и фильтрация шумов.
Мы сталкивались с ситуациями, когда даже при использовании самых современных алгоритмов фильтрации, данные от ПИМ были загрязнены артефактами, вызванными электромагнитными помехами или вибрациями. В этих случаях приходилось применять специальные методы подавления помех и калибровки датчиков. Ключевым моментом является тщательное моделирование работы системы и выявление потенциальных источников помех на ранних этапах разработки.
Кроме того, важно учитывать особенности протоколов связи и форматов данных. Не всегда существующие решения подходят для конкретной задачи, поэтому иногда приходится разрабатывать собственные интерфейсы и алгоритмы обмена данными. Наш опыт показывает, что гибкость и масштабируемость архитектуры системы являются важными факторами успеха.
Неудачные попытки и извлеченные уроки
Не всегда все идет гладко. Мы делали несколько попыток разработать ПИМ с использованием экзотических датчиков и нестандартных алгоритмов. В некоторых случаях это приводило к неудовлетворительным результатам. Например, один из проектов был заморожен из-за невозможности обеспечить требуемую точность на больших глубинах. Причиной оказалась недостаточная учет влияния гидростатического давления на характеристики датчиков.
Основной урок, который мы вынесли из этих неудач, – это необходимо тщательно анализировать требования к системе и выбирать наиболее подходящие компоненты и алгоритмы. Не стоит слепо следовать новейшим тенденциям и экспериментировать с непроверенными решениями. Важно основываться на опыте и знаниях, а также проводить тщательное тестирование и валидацию системы.
Еще один важный момент – необходимо учитывать стоимость разработки и производства. Не всегда самые современные и дорогостоящие решения являются наиболее эффективными. Иногда гораздо разумнее использовать более простые и проверенные технологии.
Перспективы развития и новые вызовы
Подводные инерциальные измерительные модули продолжают развиваться. В последние годы появились новые типы датчиков – на основе микрокапсул, нанотехнологий и оптических методов. Также активно разрабатываются новые алгоритмы фильтрации и интеграции данных, которые позволяют повысить точность и надежность систем навигации. Ключевым трендом является увеличение автономности и снижение энергопотребления.
Новые вызовы связаны с развитием искусственного интеллекта и машинного обучения. Использование алгоритмов машинного обучения позволяет автоматически оптимизировать параметры системы и улучшать ее работу в сложных условиях. Однако это требует больших вычислительных ресурсов и качественных данных для обучения. Кроме того, необходимо учитывать проблемы безопасности и надежности систем, основанных на искусственном интеллекте.
Наш завод планирует расширять ассортимент предлагаемых заводов и измерительных модулей, включая системы навигации для беспилотных подводных аппаратов, а также датчики для мониторинга окружающей среды. Мы также планируем углублять сотрудничество с вузами и научными организациями для разработки новых технологий и улучшения существующих.
Мы стремимся предоставлять нашим клиентам надежные и точные решения, соответствующие их требованиям и бюджету. Наш опыт и знания позволяют нам решать самые сложные задачи в области подводной навигации.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 RSFK2492F009C1
RSFK2492F009C1 -
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B -
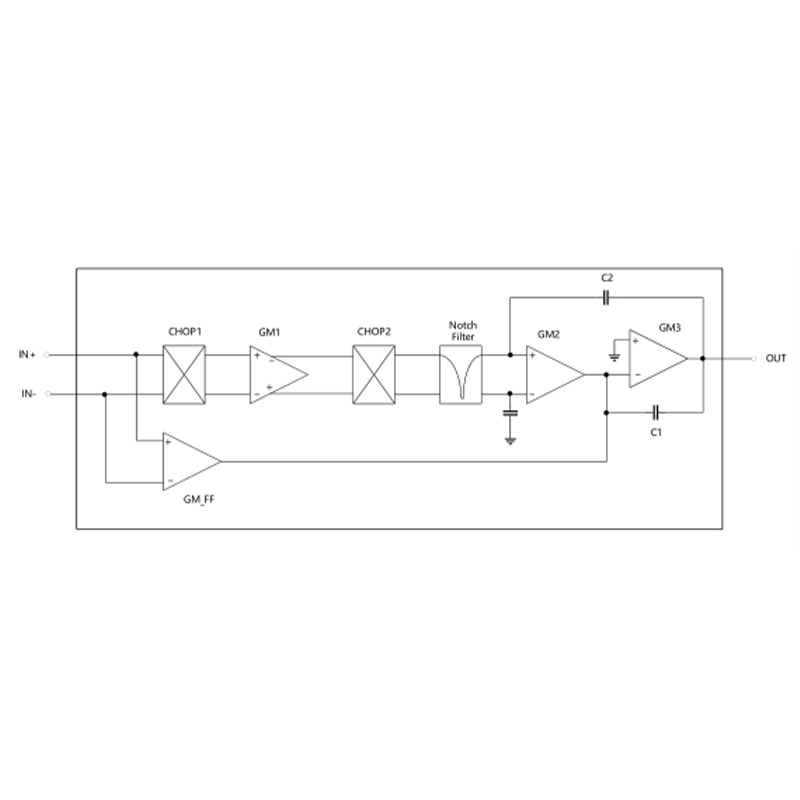
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя
CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя -
 CAXR188/2188/4188
CAXR188/2188/4188 -
 CAMPS62
CAMPS62 -
 Радиочастотный силовой транзистор MRF8P29300HR6
Радиочастотный силовой транзистор MRF8P29300HR6 -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА -
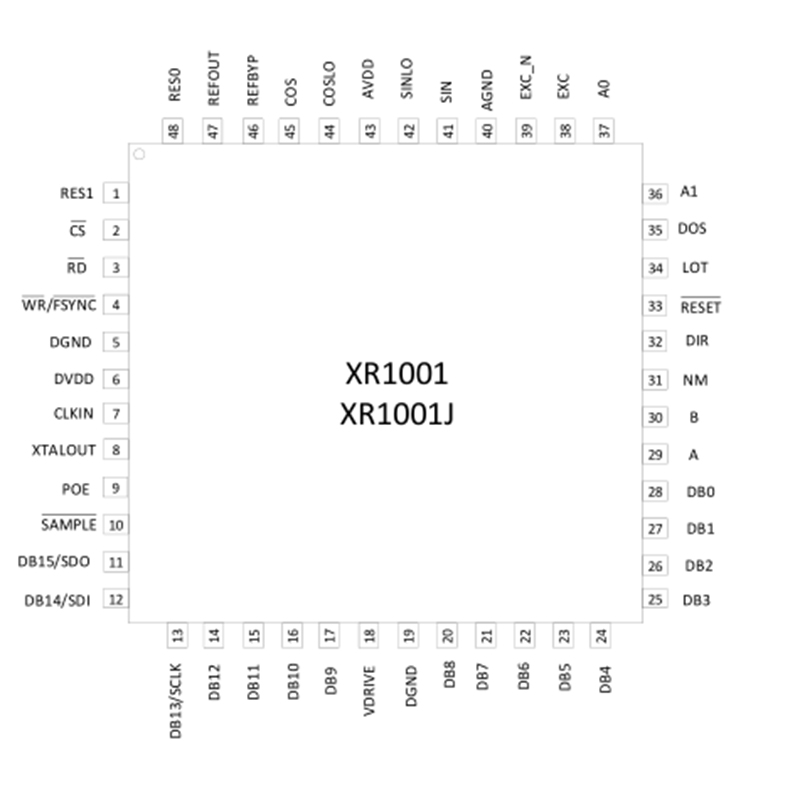 CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит
CAXR1001 – Цифровой преобразователь резольвера с разрешением 10-16 бит -
 RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр
RSFK1618F016B1 Тонкоплёночный объёмный акустический фильтр -
 Комбинированный датчик температуры и давления – Тип C
Комбинированный датчик температуры и давления – Тип C
Связанный поиск
Связанный поиск- Китай виброустойчивый высоконадежный датчик давления производитель
- Датчик мониторинга температуры и давления в холодильной цепи производители
- Датчик избыточного давления пд100 заводы
- Датчик избыточного давления воды заводы
- Коррозионностойкий комбинированный датчик температуры и давления производители
- Китай датчик высокого давления для геологоразведки производитель
- Измеритель высоты производитель
- Гироскопический модуль производители
- Керамический датчик давления заводы
- Гироскопический модуль

