
Трёхосевая интегрированная инерциальная навигационная система
Трёхосевая интегрированная инерциальная навигационная система (ИИНС) – это, на первый взгляд, довольно простая вещь. Всегда казалось, что если правильно интегрировать акселерометры и гироскопы, то все будет работать как часы. Но реальность, как всегда, оказывается гораздо сложнее. Мы сталкивались с ситуациями, когда казалось, что компоненты работают идеально, а система выдает совершенно нереалистичные данные. Проблема не в компонентах, а в их интеграции, в правильной калибровке и, конечно, в понимании того, как интерпретировать полученные данные в контексте конкретной задачи.
Что такое Трёхосевая интегрированная инерциальная навигационная система, и чем она отличается от простого гироскопического измерителя угловой скорости?
Прежде всего, важно понимать, что ИИНС – это не просто гироскоп. Это сложная система, которая включает в себя акселерометры и гироскопы, и их данные обрабатываются специальным алгоритмом. Гироскопы измеряют угловую скорость вращения, а акселерометры – линейное ускорение. Интеграция этих данных позволяет вычислить угловое положение и ориентацию системы в пространстве. Просто гироскоп дает информацию только об изменении угловой скорости, а не об абсолютной ориентации. Именно поэтому для навигации необходима интеграция.
Но интеграция – это не только сложение данных. Это математически точечная задача, требующая учета погрешностей сенсоров, шумов и других факторов, которые могут повлиять на точность измерений. Использование фильтров Калмана, например, позволяет минимизировать влияние шумов и получить более точную оценку углового положения.
Мы неоднократно сталкивались с ситуациями, когда выбирали между различными типами ИИНС. Важный параметр – это точность и стабильность. Например, для дронов, выполняющих задачи в сложных условиях (сильный ветер, турбулентность), необходимы системы с высокой точностью и устойчивостью к воздействию внешних факторов. В таких случаях часто используют ИИНС с использованием цифровой фильтрации и алгоритмов компенсации динамических нагрузок.
Проблемы калибровки и их влияние на точность системы
Калибровка – это критически важный этап при работе с ИИНС. Неправильная калибровка приводит к значительным погрешностям в измерениях. Это касается как калибровки акселерометров и гироскопов по температуре, так и калибровки на дрейф и смещение. Мы использовали специализированное оборудование для калибровки, которое позволяло получить максимально точные параметры сенсоров.
В одной из наших разработок, мы допустили ошибку в калибровке гироскопов. В результате, система выдавала ложные значения угловой скорости, что приводило к неточным расчетам положения и ориентации. Пришлось перекалибровать гироскопы и перепрограммировать алгоритм обработки данных. Это заняло несколько дней, но в итоге мы добились необходимой точности.
Не стоит забывать о калибровке системы в целом. Нужно учитывать влияние внешних факторов, таких как магнитное поле и вибрации, на работу сенсоров. Для этого мы использовали специальные процедуры тестирования и анализа данных.
Реальные кейсы применения Трёхосевая интегрированная инерциальная навигационная система
ИИНС находит применение в самых разных областях. Например, в авиации, где она используется для навигации самолетов и вертолетов. В морском транспорте – для управления кораблями и судами. В космической отрасли – для ориентации космических аппаратов. А также в системах стабилизации камер, робототехнике, и беспилотных летательных аппаратах.
Мы разрабатывали ИИНС для использования в системах стабилизации камер для съемки видео в условиях тряски. В этом случае, важно, чтобы система могла быстро реагировать на изменение положения камеры и поддерживать ее стабильное положение. Мы использовали комбинацию акселерометров и гироскопов, а также алгоритмы компенсации динамических нагрузок для достижения высокой точности и стабильности.
В настоящее время мы активно работаем над созданием ИИНС для использования в автономных подводных аппаратах. Это очень сложная задача, так как подводная среда оказывает значительное влияние на работу сенсоров. Мы используем специальные методы калибровки и фильтрации данных, чтобы компенсировать эти влияния. В этом направлении нам помогает партнерство с ООО Сиань Чэнань Измерение и Контроль Технологии – мы часто обмениваемся опытом и знаниями.
Современные тенденции в развитии Трёхосевая интегрированная инерциальная навигационная система
В последние годы наблюдается тенденция к miniaturization и снижению энергопотребления ИИНС. Это связано с ростом популярности беспроводных устройств, таких как смартфоны и носимые устройства.
Также активно развивается направление использования нейронных сетей для обработки данных с ИИНС. Нейронные сети позволяют более эффективно извлекать информацию из данных, а также компенсировать погрешности измерений. Мы сейчас исследуем возможность использования нейронных сетей для калибровки ИИНС.
Еще один важный тренд – это интеграция ИИНС с другими сенсорами, такими как GPS, IMU и барометры. Это позволяет создать более надежную и точную систему навигации.
Возможные подводные камни и способы их преодоления
Помимо калибровки и внешних воздействий, существует ряд других проблем, которые могут возникнуть при работе с ИИНС. Например, это дрейф гироскопов, который со временем может приводить к накоплению погрешностей в измерениях. Мы используем методы компенсации дрейфа, чтобы минимизировать его влияние.
Также важно учитывать влияние температуры на работу сенсоров. Акселерометры и гироскопы могут чувствительно реагировать на изменение температуры. Мы используем термокомпенсацию, чтобы снизить влияние температуры на точность измерений.
И наконец, нельзя забывать о программном обеспечении. Алгоритмы обработки данных должны быть оптимизированы для работы на целевой платформе. Мы разрабатываем собственные алгоритмы обработки данных, чтобы добиться максимальной производительности и точности.
Проблемы с дрейфом и их компенсация
Дрейф – это неизбежное явление для любого гироскопа. Он проявляется как постепенное смещение показаний гироскопа во времени, даже если он не подвергается внешнему вращению. Это может приводить к накоплению ошибок в определении углового положения, особенно при длительных измерениях. Существует несколько способов компенсации дрейфа.
Одним из наиболее распространенных методов является использование алгоритмов фильтрации данных. Например, фильтр Калмана может использоваться для оценки и компенсации дрейфа. Фильтр Калмана использует информацию как от гироскопа, так и от акселерометра, чтобы получить более точную оценку углового положения.
Другим методом является использование специализированных гироскопов с низким дрейфом. Эти гироскопы обычно более дорогие, но они обеспечивают более высокую точность и стабильность. Мы всегда тщательно выбираем гироскопы для наших проектов, учитывая требования к точности и стабильности системы. Мы постоянно следим за новинками и обновлениями в этой области, так как новые материалы и конструкции позволяют значительно снизить дрейф.
Важно отметить, что компенсация дрейфа – это не панацея. Даже при использовании самых современных методов, дрейф не может быть полностью исключен. Поэтому важно регулярно калибровать гироскопы и проводить мониторинг их работы.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 CAXR188/2188/4188
CAXR188/2188/4188 -
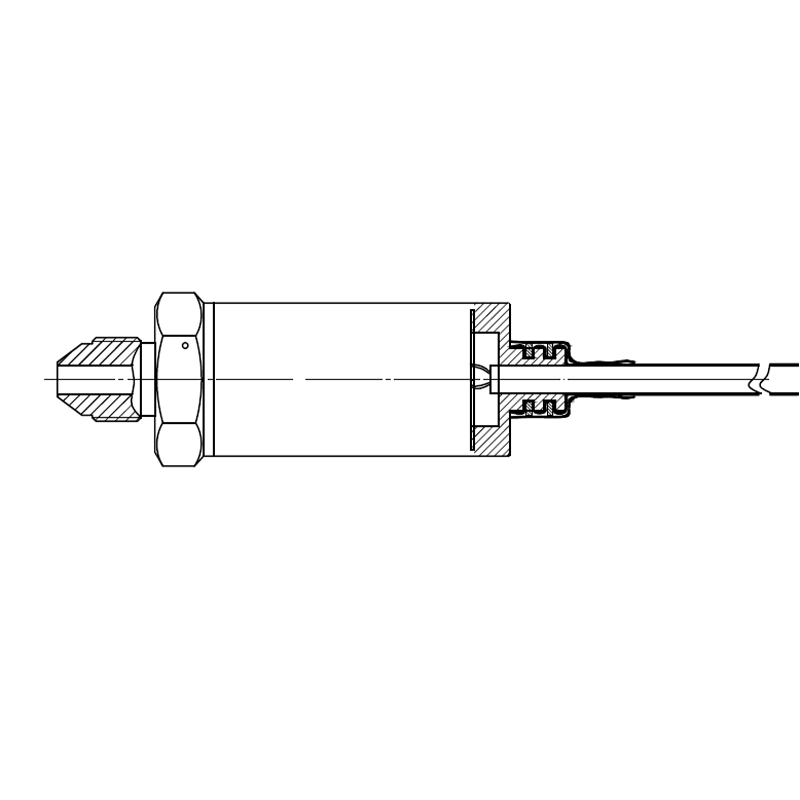 Датчик давления – Тип A
Датчик давления – Тип A -
 Комплексный тестер БПЛА
Комплексный тестер БПЛА -
 Радиочастотный силовой транзистор MRFE6VP100HR5
Радиочастотный силовой транзистор MRFE6VP100HR5 -
 CAMPS62
CAMPS62 -
 Комбинированный датчик температуры и давления – Тип C
Комбинированный датчик температуры и давления – Тип C -
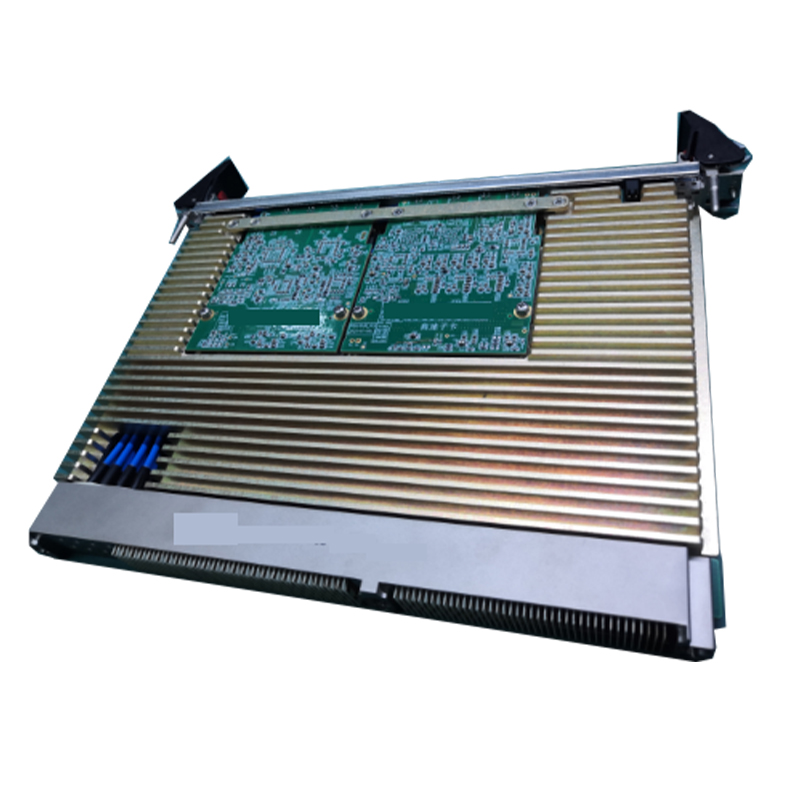 Модуль сбора и воспроизведения данных
Модуль сбора и воспроизведения данных -
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 Трехосный гироскопический модуль Чаочжи SiGM9030R
Трехосный гироскопический модуль Чаочжи SiGM9030R -
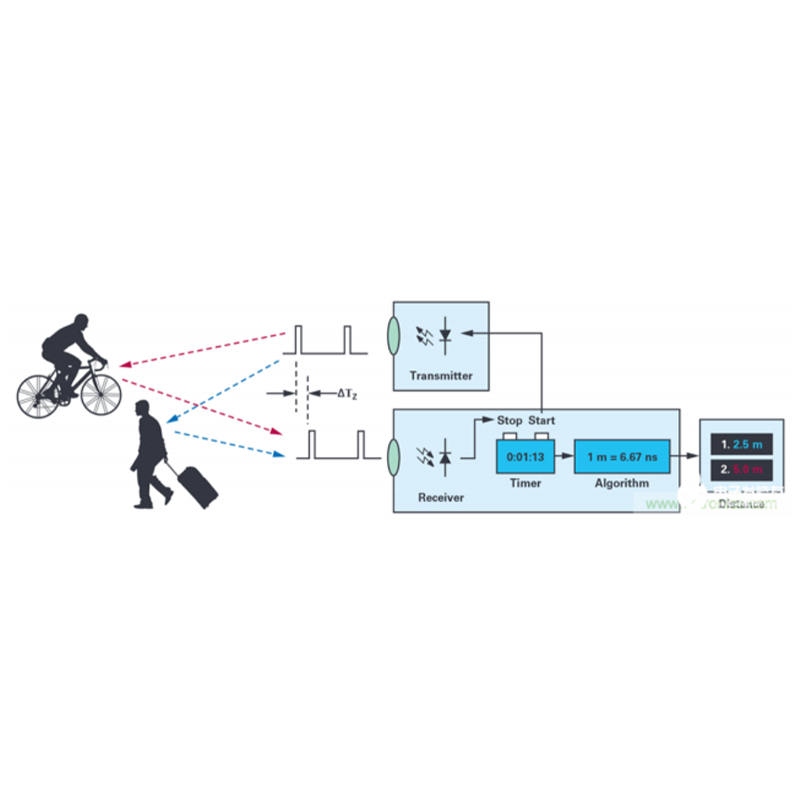 CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров
CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров -
 RSFK2492F009C1
RSFK2492F009C1 -
 CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя
CAMS37549 12V Предварительный драйвер бессенсорного трехфазного двигателя
Связанный поиск
Связанный поиск- Высокоточный mems-гироскопический модуль производитель
- Специализированный датчик давления для космических условий производители
- Монолитные fbar фильтры rsfk1800p000b1 заводы
- Специализированный низкопотребляющий датчик давления с длительным сроком работы
- Mems измерительный инерциальный блок производитель
- Высокоточный комбинированный инерциальный навигационный модуль производитель
- Специализированный датчик давления для космических условий заводы
- Комбинированный оптический преобразователь
- Датчик избыточного давления 4 20ма производитель
- Силовой транзистор

