
Трёхосевая интегрированная инерциальная навигационная система заводы
Современное машиностроение все больше ориентируется на повышение эффективности и безопасности производственных процессов. И в этой гонке одна из ключевых задач – точное и надежное отслеживание положения и ориентации оборудования. Нам часто говорят про отдельные датчики и системы GPS-трекинга, но реальные задачи, особенно в сложных промышленных условиях, требуют гораздо более продуманного подхода. Говоря о трехосевых интегрированных инерциальных навигационных системах заводы, часто упускают из виду сложность интеграции, калибровки и, что немаловажно, устойчивость к внешним помехам. Попробую поделиться некоторыми мыслями, основанными на опыте работы с различными конфигурациями, от простых систем позиционирования до сложных комплексных решений для тяжелого оборудования.
Проблема интеграции и калибровки
На первый взгляд, интеграция трехосевой интегрированной инерциальной навигационной системы заводы представляется простой задачей – подключить датчики, настроить программное обеспечение. Но реальность, как это часто бывает, оказывается сложнее. Первая проблема, с которой мы сталкивались постоянно, это несовместимость различных датчиков – гироскопов, акселерометров, магнитометров, а иногда и датчиков давления и температуры. Разные производители используют разные протоколы, разные форматы данных, и их нужно тщательно сопоставить. Это может потребовать разработки кастомных интерфейсов и адаптации программного обеспечения.
Кроме того, калибровка – это отдельная головная боль. Инерциальные датчики подвержены дрейфу, а дрейф может существенно влиять на точность измерений. Процесс калибровки включает в себя определение и компенсацию различных видов погрешностей, таких как температурный дрейф, нелинейность, смещение. Иногда для калибровки требуются специальные стенды и алгоритмы, а в некоторых случаях приходится прибегать к экспериментальным методам, основанным на реальных условиях эксплуатации.
Например, в рамках одного проекта для ООО Сиань Чэнань Измерение и Контроль Технологии (https://www.xacamc.ru) нам пришлось интегрировать систему позиционирования на тяжелую крановую установку. Нам пришлось разрабатывать алгоритм, который учитывал виброустойчивость датчиков и проводил постоянную калибровку во время работы крана. Просто использовать стандартные методы калибровки было невозможно, потому что вибрации влияли на стабильность работы гироскопов. Это потребовало значительных усилий и времени, но в итоге мы добились желаемой точности.
Влияние внешних факторов и помех
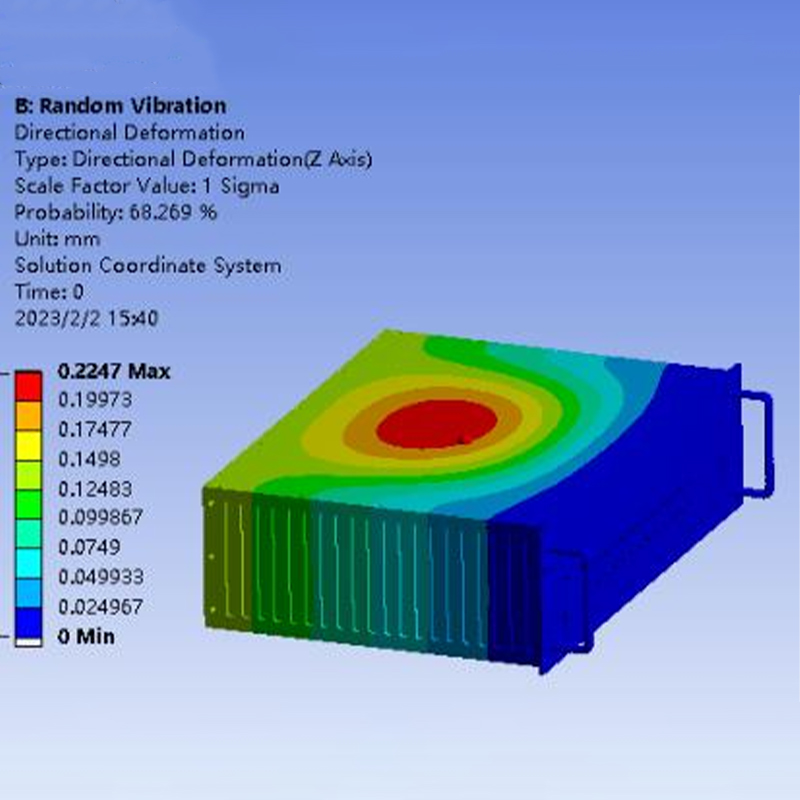
Промышленная среда – это не стерильная лаборатория. Шум, вибрации, электромагнитные помехи – все это может негативно влиять на точность трехосевой интегрированной инерциальной навигационной системы заводы. Особенно проблематичны электромагнитные помехи, которые могут вызвать ложные показания датчиков. Для защиты от помех необходимо использовать экранированные кабели, фильтры и другие средства защиты.
Еще один важный фактор – температура. Изменение температуры может приводить к дрейфу датчиков, а также к изменению геометрических размеров системы. Поэтому важно использовать датчики с низким температурным дрейфом и учитывать температурные изменения при калибровке. В холодных условиях может потребоваться предварительный прогрев системы для достижения стабильной работы.
В одном из проектов, связанных с позиционированием на открытом воздухе, мы столкнулись с проблемой воздействия солнечного излучения на магнитометр. Излучение создавало ложные магнитные поля, которые искажали показания системы. Для решения этой проблемы мы использовали специальный магнитный экран, который блокировал солнечный свет. Без этого экрана система была непригодна для использования.
Алгоритмы фильтрации и коррекции ошибок
Несмотря на все усилия по минимизации погрешностей, инерциальные системы всегда подвержены ошибкам. Чтобы повысить точность измерений, необходимо использовать алгоритмы фильтрации и коррекции ошибок. Наиболее распространенными алгоритмами являются фильтр Калмана, фильтр винеров и другие. Эти алгоритмы позволяют оценивать состояние системы на основе данных от различных датчиков и учитывать известные ошибки.
Выбор алгоритма зависит от конкретных условий эксплуатации и требуемой точности. Фильтр Калмана – это наиболее универсальный алгоритм, но он требует хорошего знания параметров системы. Фильтр винеров проще в реализации, но он менее эффективен в условиях сильного шума. В некоторых случаях можно использовать комбинированные алгоритмы, которые сочетают в себе преимущества различных методов.
Мы разрабатывали специализированные алгоритмы фильтрации для систем позиционирования в сложных условиях, например, в условиях сильных вибраций или электромагнитных помех. Эти алгоритмы учитывали особенности конкретных датчиков и адаптировались к изменяющимся условиям эксплуатации. Это требовало глубокого понимания принципов работы инерциальных систем и математического моделирования.
Будущее трехосевых интегрированных инерциальных навигационных систем заводы
Технологии трехосевых интегрированных инерциальных навигационных систем заводы постоянно развиваются. Появляются новые типы датчиков, новые алгоритмы фильтрации и новые способы обработки данных. Особое внимание уделяется миниатюризации систем и снижению энергопотребления. В будущем можно ожидать появления более компактных, более точных и более надежных систем, которые будут использоваться в широком спектре промышленных приложений.
Одной из перспективных направлений является интеграция инерциальных систем с другими системами позиционирования, такими как GPS, GLONASS, Galileo. Такая интеграция позволяет повысить точность и надежность измерений, а также обеспечить работу системы в условиях отсутствия сигнала GPS.
И, конечно же, автоматизация процессов калибровки и обслуживания – это неотъемлемая часть будущего. Для этого разрабатываются системы, которые позволяют автоматически проводить калибровку датчиков и отслеживать их состояние. Это значительно упрощает эксплуатацию системы и снижает вероятность возникновения ошибок.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Комбинированный оптический преобразователь 20-ти канальный
Комбинированный оптический преобразователь 20-ти канальный -
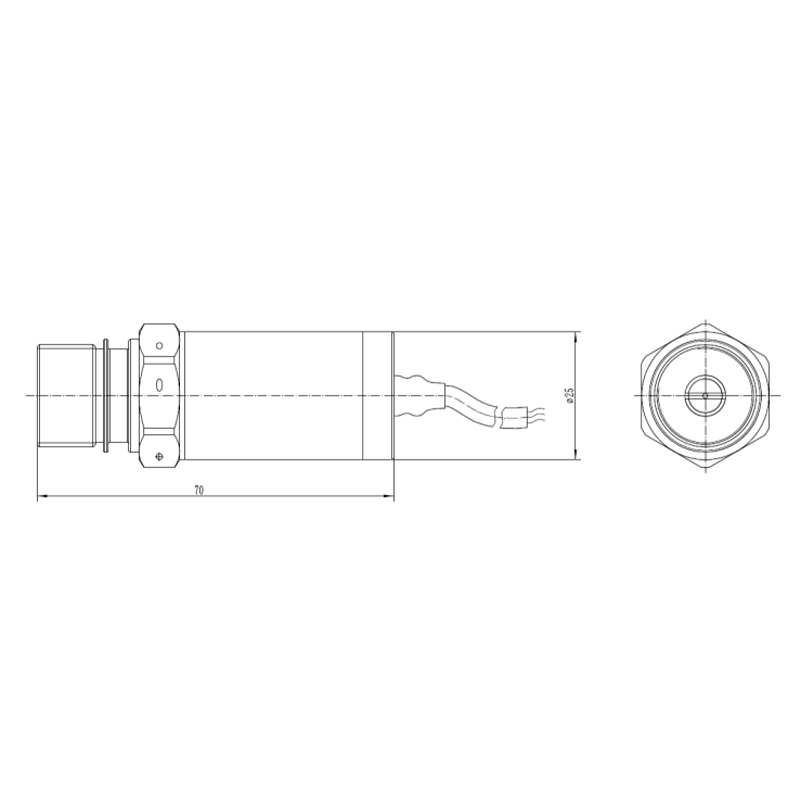
 Датчик давления – Тип B
Датчик давления – Тип B -
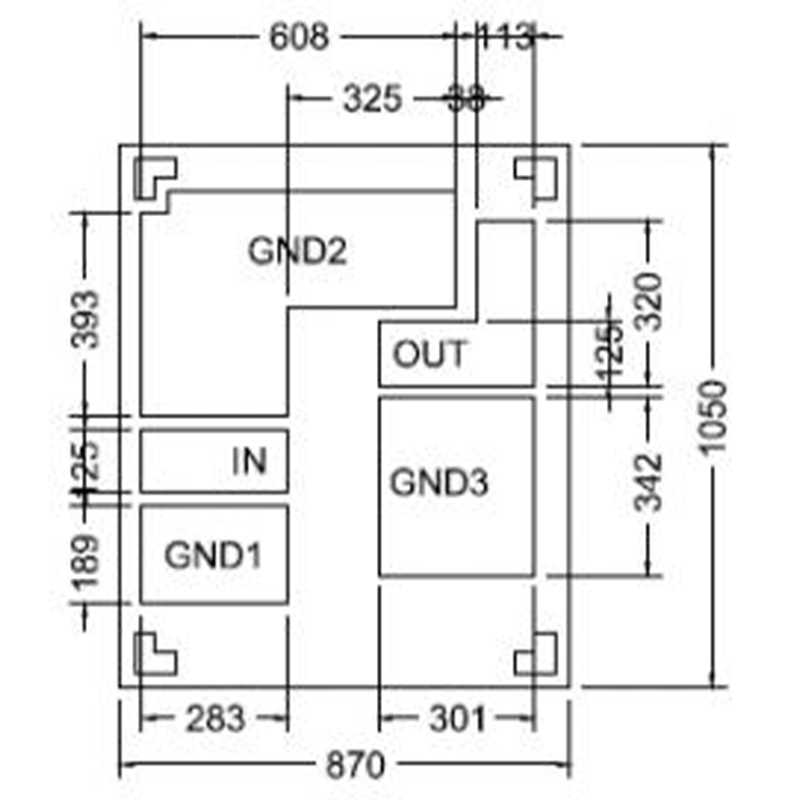
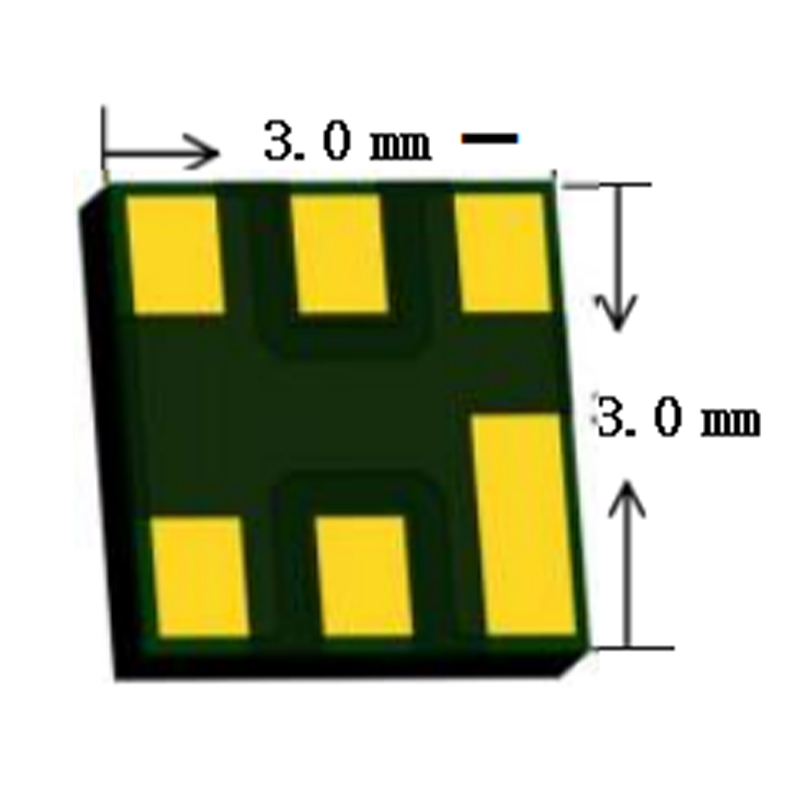
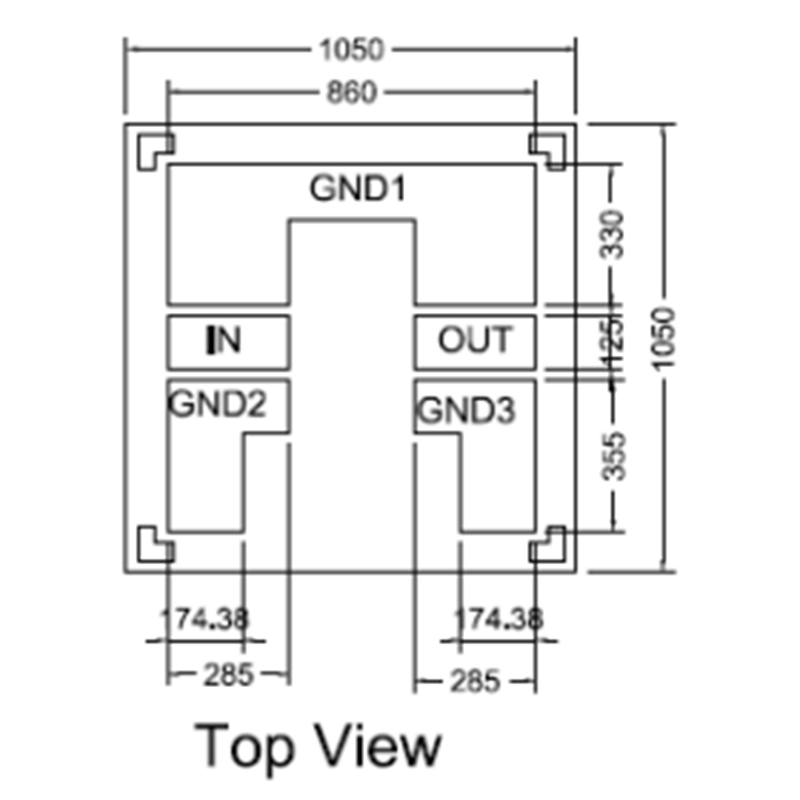
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
 CAXR188/2188/4188
CAXR188/2188/4188 -
 Модуль обработки сигналов с помехозащитой
Модуль обработки сигналов с помехозащитой -
 CAMPS49
CAMPS49 -
 Модуль сбора и воспроизведения данных
Модуль сбора и воспроизведения данных -
 RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр -
 RSFK2492F009C1
RSFK2492F009C1 -
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B -
 Датчик давления – Тип D
Датчик давления – Тип D -
 RSFK3670P019B1 FBAR-фильтр
RSFK3670P019B1 FBAR-фильтр
Связанный поиск
Связанный поиск- Широкополосный радиочастотный детектор производитель
- Комбинированный датчик температуры и давления для пищевых трубопроводов производитель
- Контроллер производитель
- Низкопотребляющий комбинированный датчик температуры и давления заводы
- Китай прецизионный операционный усилитель для обработки данных производитель
- Мощный силовой транзистор производители
- Промышленный комбинированный датчик температуры и давления производитель
- Радиочастотный фронтенд-модуль завод
- Датчик давления as20h-350 заводы
- Многоканальный модуль обработки сигналов производители

