
Чаочжи simu9030s инерциальный измерительный модуль
Сегодня часто сталкиваешься с **инерциальными измерительными модулями** (ИИМ) как с универсальным решением для навигации и ориентации. Но часто недооценивают тонкости работы с ними, особенно когда речь заходит о модулях вроде **simu9030s** от Чаочжи. Сам сталкивался с ситуациями, когда халатное обращение с настройками или неправильный выбор параметров приводят к неожиданным результатам, а иногда и к полной неработоспособности системы. Хочется поделиться не теоретическими рассуждениями, а наработками, основанными на реальном опыте внедрения и отладки этих модулей в различных проектах.
Общая характеристика и применение
**simu9030s** – это достаточно популярный ИИМ, который неплохо себя зарекомендовал в различных областях: от дронов и робототехники до систем позиционирования в автомобильной промышленности и даже в авиации, хотя и не для самых критичных применений. Его привлекательность заключается в относительно невысокой стоимости и достаточно широком спектре поддерживаемых сенсоров – акселерометров, гироскопов и магнитометров. Но важно понимать, что это не 'сделай сам' устройство. Для полноценной работы требуются грамотные настройки и калибровка. Иначе, получите совершенно неточные данные.
В ООО Сиань Чэнань Измерение и Контроль Технологии (https://www.xacamc.ru) мы регулярно работаем с подобными модулями. Компания была основана в 2011 году и специализируется на поставке электронного оборудования, компонентов и научно-исследовательских комплектующих, устойчивых к экстремальным условиям эксплуатации. ИИМ являются важной частью нашей продуктовой линейки, и мы сформировали профессиональную сервисную систему, объединяющую маркетинг, разработку, производство, поставку и обслуживание продукции. Поэтому мы хорошо знакомы с подводными камнями при работе с simu9030s.
Калибровка: не просто процедура
Калибровка – это, пожалуй, самый важный этап при работе с любым ИИМ, в том числе и с **simu9030s**. Недостаточная или неправильная калибровка приводит к значительным ошибкам в данных. Я видел случаи, когда даже небольшие отклонения в калибровке, например, из-за неправильного выбора режима калибровки или из-за влияния электромагнитных помех, превращались в критические ошибки при навигации. Нельзя просто 'запустить калибровку' и забыть о ней. Необходимо учитывать условия эксплуатации и правильно подобрать параметры.
На практике, часто возникают вопросы с выбором идеального места для калибровки. В идеале – это место с минимальным влиянием внешних факторов: температуры, вибрации, электромагнитного излучения. В реальных условиях, конечно, это сложно обеспечить. Мы часто рекомендуем проводить калибровку в помещении с постоянной температурой и минимальным уровнем шума. Иногда приходится использовать специальные экранированные помещения для снижения влияния электромагнитных помех. Это может потребовать дополнительных инвестиций, но часто это оправдывается надежностью работы системы.
Проблемы с интеграцией: совместимость датчиков
Одним из распространенных проблем при использовании **simu9030s** является совместимость с различными датчиками. Не все акселерометры, гироскопы и магнитометры одинаково хорошо работают с этим модулем. Часто приходится проводить эксперименты с различными датчиками, чтобы найти оптимальное сочетание. Кроме того, необходимо учитывать особенности каждого датчика: его чувствительность, диапазон измерения, частоту дискретизации. Эти параметры должны соответствовать требованиям приложения.
Однажды у нас был заказ на разработку системы позиционирования для небольшой дрона. Мы выбрали определенный акселерометр и гироскоп, но после интеграции с **simu9030s** обнаружили, что данные слишком шумные. После тщательного анализа выяснилось, что выбранный датчик имеет слишком низкое разрешение, и его чувствительность недостаточно высока для точного измерения ускорения и угловой скорости. Пришлось заменить датчик на более качественный, и это существенно улучшило точность позиционирования.
Влияние внешних факторов
Не стоит забывать о влиянии внешних факторов на работу **simu9030s**. Температура, вибрация, электромагнитные помехи могут значительно ухудшить точность измерений. В условиях высокой вибрации, например, в автомобиле, необходимо использовать специальные методы фильтрации данных, чтобы подавить шум. Также может потребоваться использование экранированных кабелей и компонентов для защиты от электромагнитных помех.
Мы проводили испытания с **simu9030s** в условиях сильной вибрации, чтобы оценить его устойчивость к этим факторам. Результаты показали, что при использовании фильтрации данных и правильной калибровке модуль может работать достаточно точно, но все равно необходимо учитывать влияние вибрации при разработке системы.
Альтернативы и выводы
Разумеется, существуют и другие ИИМ на рынке, такие как модули от InvenSense, Bosch Sensortec и других производителей. Выбор конкретного модуля зависит от требований приложения, бюджета и других факторов. **simu9030s** хорош своим соотношением цены и качества, но он не всегда является лучшим выбором.
В заключение, хотел бы отметить, что работа с **simu9030s**, как и с любым ИИМ, требует определенных знаний и опыта. Необходимо тщательно планировать проект, правильно выбирать датчики, проводить калибровку и учитывать влияние внешних факторов. Только в этом случае можно добиться высокой точности и надежности работы системы. ООО Сиань Чэнань Измерение и Контроль Технологии предоставляет полный спектр услуг по разработке и внедрению систем на базе ИИМ, включая калибровку, настройку и отладку. Мы всегда готовы помочь вам решить любые вопросы, связанные с использованием этих модулей. По всем вопросам обращайтесь на наш сайт https://www.xacamc.ru.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
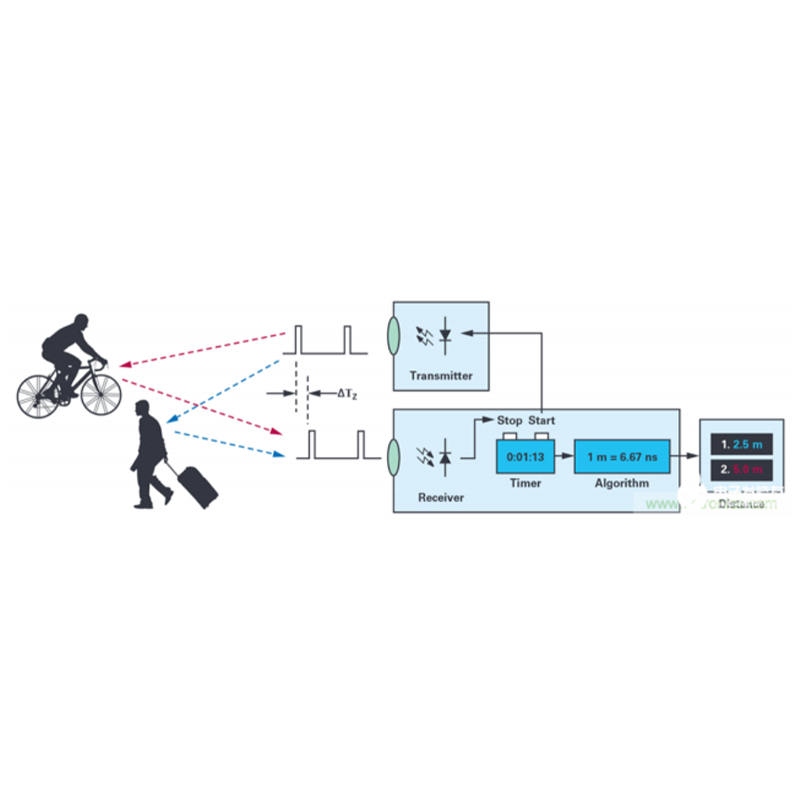 CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров
CAMS1205 Высокоточная схема измерения времени для лазерных дальномеров -
 CAMPS46/56
CAMPS46/56 -
 RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1500P000B1 Тонкоплёночный объёмный акустический фильтр -
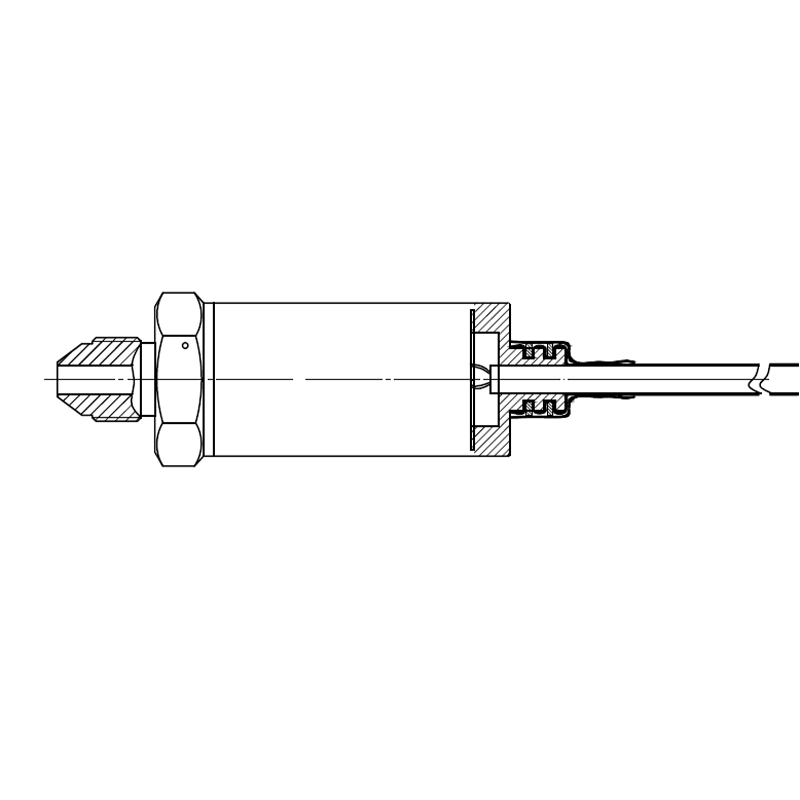
 Комбинированный датчик температуры и давления – Тип B
Комбинированный датчик температуры и давления – Тип B -
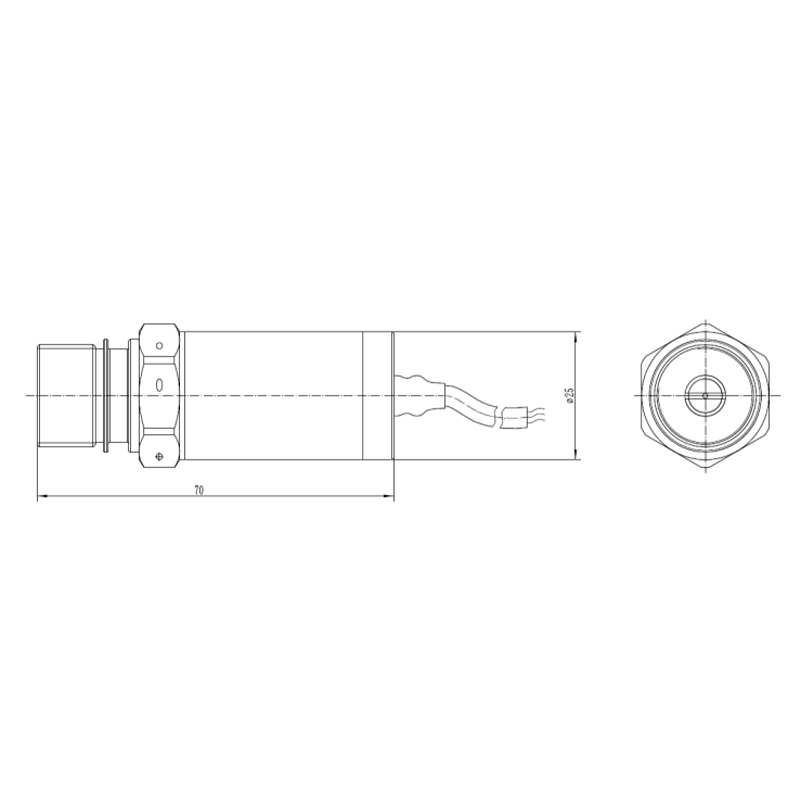
 Датчик давления – Тип A
Датчик давления – Тип A -
 Радиочастотный силовой транзистор AFT31150NR5
Радиочастотный силовой транзистор AFT31150NR5 -
 CAMPS43B
CAMPS43B -
 CAMPS62
CAMPS62 -
 RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр
RSFK1800P000B1 Тонкоплёночный объёмный акустический фильтр -
 Датчик давления – Тип D
Датчик давления – Тип D -
 Комбинированный датчик температуры и давления – Тип A
Комбинированный датчик температуры и давления – Тип A -
 Модуль сбора и воспроизведения данных
Модуль сбора и воспроизведения данных
Связанный поиск
Связанный поиск- Автомобильный силовой транзистор
- Модуль сбора и воспроизведения данных производители
- Комбинированный оптический преобразователь производители
- Китай высокоточный датчик давления для метеостанций производитель
- Высокоточный датчик температуры и давления батарей электромобилей заводы
- Промышленный оптический преобразователь заводы
- Фильтрующая микросхема производители
- Комбинированный инерциальный измерительный блок чаочжи sins6230
- Виброустойчивый высоконадежный датчик давления
- Мощный силовой транзистор заводы

